
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 [102] 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 Торт на день рождения заказ торт на заказ петербург мясной-торт.рф. рабочих частот объекта (от нуля до частоты среза озсрю). Аналогичные требования предъявляют н к датчикам, предназначенным для измерения входной н выходной величин. При определении динамических характеристик объектов целесообразно применять датчики, используемые в АСР. В этом случае знать дивамические характеристики датчиков не обязательно. При планировании эксперимента выбирают метод исследования динамики объекта, а также вид испытательного детерминированного (с заранее известным характером изменения) воздействия, Для ускорения определения динамических характеристик обычно используют метод переходных характеристик. Этот метод прост, требует минимального количества аппаратуры н позволяет получить динамические характеристики объекта за короткий промежуток времени. Если необходимо получить более точные динамические характеристики объекта, то КЧХ определяют путем возмущения объекта сигналами периодической формы Определение переходных характеристик объекта. Определение переходных характеристик объекта необходимо производить в рабочих режимах при установившихся значениях входной ХвкО и выходной УвыхО величин объекта регулирования. Выбор значений и УвыхО не имеет ьфинципиаль-hoio значения только для объектов с линейной статической характеристикой. Перед началом опыта стабилизирзт все сушественные входные воздействия. При невозможности стабилизации возмушающнх воздействий следует попытаться установить среднюю частоту их появления и сравнить с трубой Оценкой времени затухания Гх переходного процесса, которое определяют из анализа диаграмм зксплуатацновных ре-1истрнруюшнх приборов, чтобы выяснить возможность определения переходной характеристики h{t) между моментами возникновения возмущений. Pel истрацию входных и выходных величин можно производить с помощью стационарных приборов, но проведение эксперимента осложняется необходимое I ью синхронизации записи на диаграммах нескольких приборов, увеличения масштаба записи и г. д. Точное гь обработки данных эксперимента во многом зависит от метрологических характеристик аппаратуры, предщзна-ченной для измерения выходных величин. Если эксперимент проводится в условиях, когда нельзя стабилизировать источники случайных помех, нлн динамические свойства существенно изменяются по времени, то. как показывает опыт, для записи переходной характеристики можно использовать crait-лар1ные регистрирующие приборы классов точности не хуже 2,0 и со скоростью пробега кареткой шкалы за 0,5 -1 с. Вообще целесообразно применять автоматические регистрирующие приборы классов точное и 0,2 или 0,5 с ленточной диаграммой. При планировании эксперимента оценивают время проведения одного опыта и определяют необходимое число опытов. Если динамика объекта исследуется при отсутствии помех, то на каждом рабочем режиме следует снимать не менее четырех переходных характеристик; при наличии помех рекомендуется записывать до десяти переходных характеристик. При определении переходной характеристики на вход обьекта подают возмущение заданной формы, делают отметку времени иа диаграммной бумаге и записывают изменения выходной величины. При исследовании статических объектов изменение выходной величины после нанесения возмущения записывают до установления нового состояния равновесия. При исследовании обь-ектов, содержащих интегрирующие звенья (астатических), запись производят до получения чежого участка переходной характеристики с установившейся скоростью изменения регулируемой величины Если при исследовании динамических характеристик промышленных объектов на последние действуют случайные возмущения, то во время эксперименга регистрирукл некоторую функцию z(t). состоящую из случайного центрированного сигнала /(t) и полезного cHTHajia h{t): 2{t) = h[t)+f{t). (7,42) Примерный вид такого перехощюго процесса, искаженною помехой, показан на рис. 7.3,(1. Для выделения истинной переходной характерисгики используют различные методы сглаживания. Наиболее простым из НИЛ является сглаживание переходной характерис г шеи скользящим усреднением, Метод скользящего усреднения заключается в том, что на некотором интервале времени (Лг (/ - любое цеоое число, лучше четное) осуществляют последовательное усреднение ординат Z, {1 = 0, i, 2, .., п) по формуле (7.43) 0 = 0 где 1 - 0. I, 2,...,и - /; й* - оценки ординат переходной характеристики h{t}. Интервал lAt называют памятью линейного фильтра. Этот фильтр не пропускает 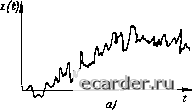 о X б x о Рис, 7.3. Переходный процесс, искаженный помехами (а), и сглаженная переходная характеристика (б): о - экспериментальные данные; х - сглаженные данные нлн существенно ослабляет гармоники функции г (О с "астотой выще 2n/IAt. Прн правильном выборе ( выделение переходной характеристики h{[) может быть выполнено достаточно точно. Уменыпение памяти против оптимального значения ведет к недостаточному выравниванию экспериментальных данных, а увеличение - к искажению существенных особенностей h{t) и потере части ординат hf с индексами 11/2- { и in- 1/2+ \. Так как начальный участок к{г) определяет структуру передаточной функции объекта, а конечный - коэффициент усиления объекта, то для сглаживания скользящим усреднением необходимо начинать регистрацию г(() несколько раньше момента нанесения возмущения и прекращать при t > Tjj;. По этим же соображениям лпя сглаживания z{t) сначала берут 1 = 2-4, затем визуально Оценивают h* (t) и, если необходимо, увеличивают (. Пример 7.1. Выполним сглаживание переходной характеристики z(t), снятой экспериментально. Измерения пронзводш1Ись в точках z; при 1=0, 1, ..., 19 через At = 40 с, Результаты экспериментальных измерений приведены в табл. 7.7. Выбираем / = 4. Прн этом будут потеряны ординаты с индексами г 4/2 - 1 и i 19 - 4/2 + 1 = 18, т. е, ht, ht, hi s и htg. По (7.51) находим ординату А5 переходной характеристики; р = о = -j(zo + Zi + Z2 + z + г*) = = ~(l + 4 + 0 + 5 +2) = 2,4. Ордината = у (zi + Г2 -1- гэ + Z4 + zj) = = y(4-(-0 + 5 + 2 + 8) = 3,8. Остальные ординаты находятся аналогично. Результаты расчетов h+nz приведены Таблица 7,7, Сглаживание переходной характеристики скользящим усреднением при 1 - 4
в табл. 7.7. Графическое изображение результата сглаживания приведено на рис. 7.3, б. После Проведения эксперимента обработке подлежат сг;1аженные переходные характеристики hj (t), которые в дальнейшем следует привести к одинаковому знаку, нормировать (если это не было сделано до сглаживания), усреднить и аппроксимировать. Нормирование сглаженных характеристик hj{t) осуществляется по формуле h.{i) = hj{tyA, (7.44) где /ij (г) - переходная сглаженная характеристика, экспериментально полученная в -м опыте; Aj - амплитуда испытательного сигнала в j-m опыте. В результате опыта получайся q переходных характеристик /i,(i), обычно 01личных друг от Друга. Их необходимо усреднить по формуле 4& h{t) = - (745) и аппроксимировать. В простейшем случае при практических расчетах наиболее часто h(t) объекта аппроксимируют либо апериодическим звеном с запаздыванием (рис. 7,4, а) (7.46) либо HHTei рируюшим звеном с запаздыванием (рис 7.4,6) Woe(p)=e~Pob. Р (7.47) Более точные результаты аппроксимации можно получить, используя изложенный ниже метод [27]. Рассмотрим характеристику h(t), изображенную на рис. 7.5, Такие характеристики часто называют S-образными. Обьек i с такой характеристикой можно представить в виде нескольких последовательно соединенных апериодических звеньев первого порядка. При подборе математического выражения, соответствующего S-образной переходной характеристике, прел1юложим, что рассматриваемое звено ВЫСОК01 о порядка состоит из нескольких последовательно соединенных одинаковых апериодических *веньев первого порядка. Такое предположение нозволяе i получить передаточную функцию объекта в виде Иоб(р) = (Тр + 1)" (7.48) 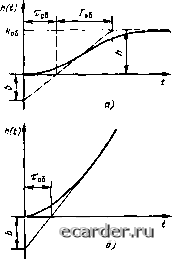 Рис. 7 4. Экспериментальные переходные характеристики статических (а) и астатических (б) объектов регулирования h{t). Рис. 7.5. Переходная характеристика объекта высокого порядка где 7 - постоянная времени }веньев; т = = 1, 2, 3,,..- число апериодических звеньев. При желании добиться более гочного совпадения опытной кривой с аппроксимирующей сложное звено рассматривают как цепочку, состоящую из нескольких последовательно соединенных апериодических звеньев первого порядка с одинаковыми постоянными времени Тг и одного апериодического звена с отличающейся 1юстоянной времени Ту. В этом случае ИобСр) = 7- , ,,] (7.49) ITip-f \)(Т2Р+ 1)" где 7"i > Т2 - постоянные временя звеньев; п = 1, 2, 3,...-число одинаковых звеньев, 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 [102] 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||