
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 [108] 109 110 111 112 113 114 115 116 117 118 119 120 121 Таблица 7.12. Анялнтическне выражения для корреляционных функций м спектральных плотностей
Примечание. Bo всех формулах 0, = К,(OJ. им формулы для спектральных плотностей. В заключение заметим, что расчеты статических и динамических характеристик объектов регулирования н с атлетических характеристик возмушений целесообразно проводить иа ЭВМ. Программы таких расчетов разработаны и опубликованы в [2]. 7.2. ПРИБЛИЖЕННЫЕ МГГОДЫ ПАРАМЕТРИЧЕСКОЙ ОПТИМИЗАЦИИ АСР Критерии оптимальности Параметрическая оптимизация АСР направлена на достижение определенной целн, которую прежде всего надо четко сформулировать и формализовать в виде математического описания. Например, очень часто цель параметрической оптимизации АСР сводится к выбору таких параметров настройки регуляторов, которые обеспечивают в системе запас устойчивости ие ниже заданного при всех возможных вариациях параметров математической модели объекта регулирования. Иногда этого оказывается достаточно, но чаще - нет. Запас устойчивости АСР - это необходимое, ио ие достаточное условие ее ка- чественной работы. Поэтому сформулированная цель дополняется некоторыми ограничениями, накладываемыми на качественные показатели процесса регулирования. Близость достижения поставленной цели можно характеризовать некоторым целевым функционалом, который называется критерием оптимальности. Выбор критерия оптимальности является одной из ответственных и сложных задач расчета АСР, не поддагошихся формализации. В теоретических исследованиях очень часто критерий оптимальности связывают с некоторым обобщенным показателем, характеризующим качество регулирования, например с интегральными оценками качества, с лнсперсией н энтропией ошибки регулирования, полагая, что между ними существует однозначная связь. Такой подход в большинстве случаев яаляется вполне оправданным. Преимущество его состоит в том, что полученные результаты можно распространить на большое число промышленных объектов регулирования, не касаясь физической сущности происходящих в них щюцессов. а оптируя лишь их математическими моделями. В практике наладки АСР промышленных объектов пока преобладает детерминистский подход, связанный с минимизацией интегральных оценок качества регулирования (интегральный критерий) вдоль границы области допустимых по условиям заданного запаса устойчивости АСР значений параметров настройки регуляторов. Однако наличие в реальных зксплуатапионных условиях случайных возмущений на объект регулирования приводит к необходимости исполь-зопания для расчета промышленных АСР статистических критериев оптимальности. Большинство этих критериев в общей форме можно Представить в внде \f{f{x,y)} = MTH, (7.124) где М - символ математического ожидания; / (х, у) - некоторая функция требуемого х и действительного у значений выходных сшна-лов АСР. Для определения оптимальной системы по критерию (7.124) при произвольной функции / (х, у) необходимо полисе знание видов распределения ,х и у. К сожалению, эти сведения ие всегда могут быть получены исходя нз технологических особенностей работы АСР. Неполное знание распределения x к у позволяет решить задачу поиска онзимальных систем только для отдельных ви;юв функции / (х, у). В частности, если предположить, что распределения нормальные (а нормальное распределение вследствие его широкого распространения является наиболее вероятным), то наиболее вероятной в статистическом смысле оптимальной системой является линейная, син-те:шроваиная по (7.124) • Пх,у){х-у). (7.125) В таком виде критерий носит название критерия минимума средней квадритической ошибки (дисперсионный критерий). При гаус- совском распределении х и у система, синтезированная по этому критерию, оказывается оптимальной и с точки зрения многих других критериев. Вот почему критерий минимума Средней квадратической ошибки получил наибольшее распространение при оптимизации промышленных АСР. Этот критерий является простейшим с математи>шской точки зрения и имеет экономическое и технологическое обоснование для многих промышленных объектов, связанных с регулированием лавления и температуры, с поддержанием максимального значения КПД, минимальных энергетических и мaтepиaJIЬныx потерь и т. п. Таким образом, в предположении нормального распределения хну критерий минимума средней квадратической ошибки явояется наилучшим и в некотором смысле вынужденным из-за отсутствия достаточных априорных сведений о требуемых и действительных распределениях хну. При гауссовском распределении между средней квадратической ошибкой регулирования и ее энтропией существует однозначная связь. Поэтому в последнее время вместо критерия минимума средней квадратической ошибки регулирования при расчете оптимальных параметров настройси регуляторов находит примеиепие критерий минимума энтропии ошибки регулирования (информационный критерий). Несмотря на мате-матичесв:ую общность обоих критериев последний является более строгим, снимая, по сути дела, вопрос о вьшуждеиной необходимости использования гауссовского распределения из-за незнания истинного. При гауссовском распределении энтропия ошибки регулирования максимальная, а действие помех наиболее эффективно. В зтом случае Таблица 7.13. Формулы ВТИ
US 0,01 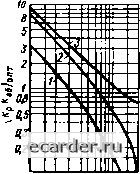 U,1S0 0,4 dSta/ToS 3,1 0,5 0,3 0,5{9Ха1Тл Рис. 7.24. Номограммы для опредсчения оптимальных параметров настройки И-pei улятора (я) и П-регулятора (6) статических объектов: ; - ф = 1,0 0,95, 2 = 0,95 -г 0,85; 3 - »; = 0,85 0,75 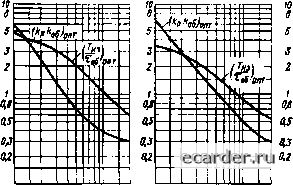 HI 0,150,2 %Ч 0.бЩро %1 0,150,2 0,4 STos/Tof 0,1 150,2 0,4 й<УГ„/7"а Ч) 5) в) Рис. 7.25. Номограммы для определения оптимальных параметров настройки ПИ-регулятора статических объектов: а - ф = 1,0-ьО,95; б - = 0,95 0,85; ч- = 0,85 0,75 Рис. 7.26. Номограммы для определения оптимальных параметров настройки ПИД-рсгулятора статических объектов: а - ф - 1,0 + 0,95; 6- 0.95 ч- 0,85; в-- = 0,85 =- 0,75 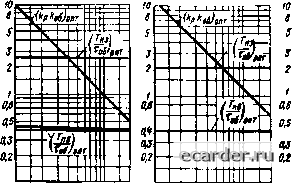
гМЛ«г Oi40,6toslTo 0.10502 0,4 0,6%в/Ь 0,1 02 0,4 OfiXgsjTa a) SJ 6) 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 [108] 109 110 111 112 113 114 115 116 117 118 119 120 121 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||