
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 [109] 110 111 112 113 114 115 116 117 118 119 120 121 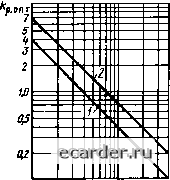 0,1 0,г 0,5 тоб1Тв5 Рис. 7.27. Номограм.ма для определения оптимальных параметров настройзш П-регулятора астатических обьектов: 1 -•]f l,0-i-0,95; 2-»; = 0,95-0,85 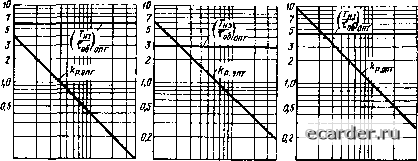 о>г 0,1 0,5 1,0 Tos/Tas 0,1 HZ 0,5 insfhs 0,1 0,5 bOXosloS a) SJ в) Рис. 7.28. Номограммы для определения оптимальных параметров настройки ПИ-регулятора астатических объектов: а - = 1,0-;-0,95; б - ф = 0,95-0,85; в - »; = 0.85-0,75 Рис. 7.29. Номограмма для определения оптимальных параметров настройки ПИД-регулятора астатических объектов: а - = 1,0 0,95; 6 - 0,95 0,85; в - ф = = 0,85 -н 0,75 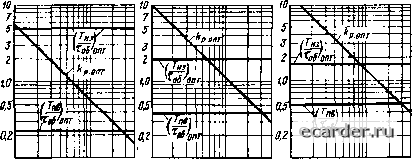 0,1 0,2 «5- bOtoslToS 0,1 0,2 0,5 1,0 toJTgs 0,1 0,3 0.5 1.ato5/fo5 расчет системы ведется на наихудшие условия ее работы, и это уже ие вынужденное, а необходимое решение [16, 17] В заключение сформулируем в общем виде критерий параметрической ошимизации промьлилеиных АСР: параметры настройки регуляторов должны быть выбраны такими, чтобы в замкнутой АСР был обеспечен заданный запас устойчивости; при этом выбранный показатель качества регулирования должен быть не хуже труемого (или должен иметь экстремальное значение). Поскольку в теории автоматического регулирования запас устойчивости может бмть оценен по-разному, а также используются различные показатели качества регулирования (см. § 2.2), в инженерных расчетах применяются несколько методов определения оптимальных параметров настройки регуляторов. Ниже рассмотрены наиболее распространенные из ннх. Прнб;шженные формулы для определшия параметров настройки В практике иала;ючных работ широко используют приближенные формулы для определения оптимхпьных параметров на-строш:и регуляторов в зависимости от параметров моделей обьектов регулирования, а1шроксимированных выражениями (7.46) и (7.47), и различных критериев оптимальности. Наиболее длитeJьнyю проверку временем выдержали формулы (табл. 7.13), предложенные Всесоюзным теплотехническим институтом им Ф. Э, Дзержинского (ВТИ). В качестве критерия параме1ричсской оптимизации в формулах ВТИ приняты степень затухания (2,64) \/ = 0,75 и интегральная квадратичная оценка качества /з (2.71), близкая к минимуму. Номограммы Для моделей объек гов регул1фоваиия (7.46) и (7.47) для различных критериев парамет рической оптимизации предложен ряд номограмм по о1греяеяению оптимальных параметров настройкн линейных моделей аатсйдотачадшх регуляторов. На рис. 7.24-7.26 приведены номограммы Д.чя определения оптимальных параметров наст1Эой1Ьи. П.-. ПИ[1,-\г«-ляторов статических объектов с перелаточ-ной функцией (7.46). На рис. 7.27-7.29 приведены диаграммы для определения оптимальных параметров настройки П-, ПН-, ПИД-регуляторов астатических объектов с передаточной функцией (7.47). При пользовании этими номограммами следует полагагь = 1/£(. Все номо1рам-мы построены по критерию 2 = "" (•71) для различных \> (2.64). 7.3. АНАЛИТИЧЕСКИЕ МЕТОДЫ ПАРАМЕТРИЧЕСКОЙ ОПТИМИЗАЦИИ АСР В аналитических методах первая часть peHJCHKB поставленной задачи связана с построением в плоскости параметров настройки регулятора обтасти заданного запаса устойчивости свободного движения замкнутой АСР Точность решения пой задачи зависит от того, как заданы (определены) динамические свойства обьекта регулирования Ьсли динамические свойства объекта регулирования (передаточная функция КЧХ и т п) определены в аналитической форме, то предпочтение следуег отдать методу расширениых КЧХ. Если динамические сб<ж-ства объекта регулирования (КЧХ) определены экспериментально, то предпочтение следует отдать методу максимума АЧХ Дальнейшее решение поставленной задачи связано с выбором оптимальных значений параметров настройкн регулятора точки на границе области заданного запаса усгойчивости АСР, обеспечивающей экстремум выбранному косвенному показателю, оценивающему качество регу:гирования. Выбор этой точки не зависиг от того, как была построепа граница области заданной сгепени колебательности. Оно определяется в основном сггатистнческнми харакгеристи-камн действующих возмущений Метод расширенных КЧХ Поясним идею метода на примере АСР с ПИ-регуляюром [29]. Полученные результаты несложно распространить на системы с И- и П-pei уляторами путем предельных переходов itp = О или Ap/T, = О, а гакже на АСР с ПИД-ре1улятором. положив Т„в/Т„ = = макс = const. В основе метода лежит понятие так называемых расширенных комплексных частотных характеристик W{m,j<o), получаю- jy = (ау ~ т), где т связана с вь1раженнем (2.65). Передаточная функция ПИ-регулятора в рассматриваемом методе расчета задается в виде [29] Нр{р)=-{со/р + сД (7.126) где Со=кр/Т; ci =кр. Расширенная КЧХ ПИ-регулятора J\-r + arctg l/(co~- mcoci) + (mci) 0) + 1 Сп - шок, - - arclg (7.127) Для объектов, заданных передаточными функциями (7.46) и (7.47), их расширшные КЧХ соответственно имеют вид 1/ш2гб + (тшГоб-1)= об""°"А Г7.128) Иов(11,» = -.х col/m* + 1 Л (7,129) Исходным для расчета границы области заданной степени затухания i/ (степени колебательности т) является соотношение [29] (m, ym) WJ, (ш. усо) = 1. (7.130) Представим расширенные КЧХ объекта и регулятора в виде ИобКУй)) = 4об(т,«)е*о("-р>; (7.131) Ир (т, » = (и, со) г"р(7.132) Тогда (7.130) преобразуется в систему двух уравнений Лр(т, ш) = 1Моб(т, со); Фр(т, ш)= -ФобКш)- (7.133) Левая часть этих уравнений зависит от со н искомых паршиетров настройки регулятора Со и Ci. Правая часть уравнений зависит от частоты О) и известных параметров объекта. Разрешив (7.133) относительно С(, и Ci, найдем границу области заданной степени колебательности т в параметрической форме: Со = Со (ш), •) , , ) (7.134) ci = ci (со). / Задавая различные значения со но (7.134), можно построить искомую границу заданной степени колебательности т. Для объекта с передаточной функцией (7.46) решение имеет вид Со--- cos u)Tofi - - тсотоб - Трб Тоб sm сотоб 2тшТоб - °СОЗШТоб + (7.135) Для объекта с передаточной функцией (7.47) решение имеет вид со (1 + т)\ 0 -----шпдд (cos CDTos - т sm (BTog); - = -[2"» COS сотоо + (1 - т) sin гатб]. (7.136) Для обьектов с передаточной функцией любого вида задача несложно программируется и решается на ЭВМ. Такие программы разработаны и опубликованы в [2]. По результатам расчета в плоскости параметров настройки регулятора Ci - Со строится граница области заданного т (рнс. 7.30). Дальнейшие поиски опгимальных параметров настройки регулятора сводятся к нахождению оптимальных параметров настройки регулятора на границе области заданной степени колебательности. Если предположить, что действующие в АСР возмущения являются низкочастотными (в частности, детерминированные возмущения типа «скачка» являются низкочастотными), то оптимальные параметры настройки ре1улятора соответствуют условию 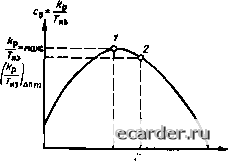 р.опт г"*р Рис. 7.30. Грайицы области заданной степени колебательности 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 [109] 110 111 112 113 114 115 116 117 118 119 120 121 |