
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 [110] 111 112 113 114 115 116 117 118 119 120 121 pITm = "кс (точка } на рис. 7.30). В этом - инверсная расширенная КЧХ объекта; случае интегральная оценка i2, определяемая по (2.71), стремится к минимуму. Чаще выбирают оптимальной точку 2 на рис. 7.30, расположенную правее точки J [16, 29]. Все расчеты программируются для нх выполнения на ЭВМ. Программы таких расчетов приведены в [2]. В простейшем aiy-чае их можно выполнить на программируемых микрокалькуляторах. Ниже в качестве примера приведена методика расчета оптимальных параметров настройки ПИ-регулятора на микpoкaлькyJrя-торе БЗ-39. Программа расчета составлена для одноконтурной АСР с ПИ-регулятором н объектом с передаточной функцией тр + t2p + Ъ из которой можно получить следующие модели объекта: (об1 (р) = об При Ti = Ti = О, Тэ = 1; W,52(P) = [1/(7"2Р)] е""" при /Со, = 1. Ti = Тз = 0; to63(p) = [W(72P + l)]"" при Т, = о, Тэ = 1; 064(р) = {кф1ЫТ,р + 1)]}" при Тз = 1, Гэ = 0; Wo5tip) = 1к,5/{ТУ + Ър + 1)]е"б при Тз = 1. Приведенные передаточные функции объектов регулирования охватывают достаточно большой круг практических инженерных задач. Модель ПИ-регулятора принята в виде Щ,(Р)= -ici +Со/р), где ci = кр-. Со = /ср/Тиз- Расчет границы области заданной степени колебательности выполняется по методу расширенных КЧХ. Исходным для расчета является выражение (р) = 1/Иб (р)- Подставляя в него р = -т(й + jay, получаем Щ, {т. jm) = W%Q (m, », где Wp (m, jay) = RCp (m, oj) +7 ЗШр (m, ш); RCp (m, 01 = Co ---- + Ci; 01 (m + 1) Jmp (m, 01) =i co/oi(m + 1); tr*6(/«,»=l/[tr («,»] = = Re*6 (m, 01) + ; Jm*6 (m, 01) Re*fi (m, 01) {[(ori(m-l)- - Tjmoi + T3] cos - № (T2 - - 2m(i)Ti) sin мТоб}; Jm*6(«, Ш) = .-""" {[coT, im - - 1) - Tjmo) + Tj] sin ШГ06 + + to {t2 - 2m(i)Ti) cos 01Гоб}-Из системы уравнений Rep(ni, ш) =Re*6("i, o);l Зшр (m, со) = Зт*б (m, 01) J получаем уравнение границы области заданной степени колебательности в параметрической фор.ме: Со (т, ш) = to {т + 1) Jm* (m, со); ci (m. to) = m Jm*6 {m, to) - ReU {ti, со). Расчет Co и с, выполняется по программе, приведенной в табл. 7.14. Порядок работы с программой следующий; 1) перед началом работы поставить переключатель «Р -Г» в положение «Р»; 2) перед вводом программы нажать клавиши В/О F ПРГ, после чего на индикаторе должен загореться адрес ввода программы 00; 3) ввести программу (контроль правильности ввода ведется по коду операции, считываемому с индикатора). Ошибочный ввод можно исправить с помощью клавиш ШГ и ШГ, перемещая программу вперед и назад и заменяя неправильный набор правильным; 4) проверить правильность ввода программы. Для этого последовательно нажать клавиши F АВТ 1П0П1П2ПЗП4П5 П 6 П 7 В/О С/П, После останова прочесть число - 1. Нажать клавишу С/П, прочесть число -3,9753221 -01. Нажать клавишу С/П, прочесть число -5, 0832598-01. Нажать клавишу С/П, прочесть число 2. Если хотя бы одно число отличается от приведенных, проверить правильность ввода про1раммы; 5) ввести исходные данные, нажав последовательно клавиши F АВТ кПОТП! Tjtll Тэ П 3 г П 4 ш П 5 Дсо П 6 m П 7. Рекомендуется расчет начинать с to = 0. Величина Дсо = со;+, - to, определяется после первых прикидочных расчетов Со и Ci Таблица 7,14. Программа расчета на микрокалькуляторе БЗ-34 Гранины области заданной степени колебательности по расширенной КЧХ Продолжение табл. 7.14
с желаемой точностью построения Cq = ~f{Ci). Обычно при Т; > 10 с Дсо выбирается в диапазоне 0,005 - 0,01; 6) пустить программу, нажав клавиши В/О С/П. После останова прочесть текушее Значение ш; 7) нажать клавишу С/П, после останова прочесть значение с; 8) нажать клавишу С/П, после останова прочесть значение ci; 9) нажать клавишу С/П, после останова прочесть значение (Hj+i = со; + Лео; 10) повторить 7-9 до получения желаемого результата. Прнмер 7.7. Определить границы области заданной степени колебательности АСР с ПИ-регулятором и объектом с передаточной функцией le~° Таблица 7.15. Результаты расчета % = /{£\) к примеру 7.7
Шаг по частоте Дсо = 0,01, начальное значение со = О, значение т = 0,221. Одя решения необходимо: 1) ввести программу; 2) ввести исходные данные, нажав последовательно клавиши F АВТ 1,1 П О О П 1 50П21 П3 10П4ОП5 0,01 П 6 0,221 П 7; 3) пустить программу, нажав клавиши В/О С/П. После останова прочесть и = 0; 4) нажимая только клавишу С/П, после каждого останова прочесть соответственно Coh Си и й>,+ , = й>, + Дй); 5) результаты расчета свести в табл. 7.15. Кроме метода расширенных КЧХ разработаны и более строгие методы решения, учитывающие статистические характеристики действующих возмущений, Рассмотрим два из них. ДнсперсишныЙ метод В этом методе качество регулирования оценивают по значению дисперсии ошибки регулирования ai Если задающее воздействие X (О = const, а возмуи1аю1цее воздействие ф (г) приложено к выходу объекта регулирования, то (JCO, (7.137) где (ш) - спектральная плотность возмущения ф((); ИобС/о), Wp(7to)-K4X объекта и регулятора соответственно. Двигаясь вдоль 1раницы области заданной степени колебательности (см. рис. 7,30), гюжио построить по (7-137) зависимость rjj=/(kp) аналогично изображенной на рис. 7.31 и по критерию = мнн выбрать оптимальные значения /Ср и Г„з, Задача может быть также решена на ЦВМ и АВМ. Программы расчета для ЦВМ разработаны и опубликованы в [2]. Применение АВМ основано на использовании зависимости (2.85). когда на вход ЛСР подается белый шум с корреляционной функцией, равной 5-функции. Для это1 о сна-чада белый шум пропускают через формн-руюнщй фильтр, на выходе которого получают сигнал с заданной (со). Параметры формирующего фильтра (рис. 7.32) выбирают по характеристикам 5, (о) из следующих соотношений. Если на вход фшгьтра подать белый шум со спектральной плоскостью S(m) = 1, то спектральная шютность выходного сигнала sЛй>) = Иф(co) (7.138) откуда передаточная функция формирующего фильтра Wф(p) = 5,(--yм)J„,.p. (7,139) Таки.м образом, для получения (р) надо 5ф(со) разложить иа два сомножителя S, (со) = (+j(u) i-Jm) (7.140) и в сомножителе (+/co) заменить jto на р. Например, если 5(со) = 2а5у/(у2 + ш2),= = а, l/2/(y + jta) а, V/(y - jm), (7.141) 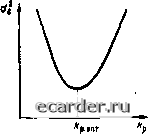 Рис. 7.31. Зависимость uj = /(ftp) вдоль границы области заданной степени устойчивости
Рис. 7.32. Формирующий фильтр 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 [110] 111 112 113 114 115 116 117 118 119 120 121 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||