
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 [113] 114 115 116 117 118 119 120 121 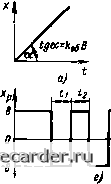 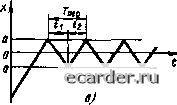 рис. 7.41. Переходные процессы в системе с двухпозиционным регулятором и объектом в виде интегрирующего звеиа: л - переходная характеристика объекта; б - статическая характеристика регулятора; « - изменение регулируемой величины; г ~ регулирующее воздействие регулятора koSSj а О -а  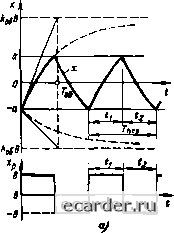 Рнс. 7.42. Установившиеся автоколебания в системе с двухпозиционным регулятором и объектом в виде апериодического звена: и - при параметрах статической характеристики регулятора Bj = = В и а »* 0; б - то же, но при Bi Bi и о о 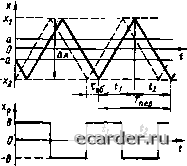 Рис. 7.43. Переходные процессы в системе с Щл{р) = ке~"/р при В, *=Bj = B и 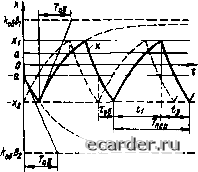 Рис. 7.44. Переходные процессы в системе Ща(р) = ке-"/1ТобР+) при Bi Ф Вг и автоколебаний, их периода р, частоты переключений л регулятора, положительной Х и отрицательной амплитуд отклонения регулируемой величины от заданного значения и диапазона Ах колебаний регулируемой величины приведены в табл. 7.16. Так как при Ф Вг амплитуды автоколебаний не равны, то для обеспечения равенства амплитуд колебаний относительно заданного значения при практической настройке регуляторов следует скорректировать задание регулятору на величину £о = Лоб (Bi - Вг) to6 (7.158) для астатического объекта и иа величину Ео = об (Si - Вг) (1 - (7Д59) для статического объекта. Из табл. 7.16 следует, что уменьшение зоны нечувствительности 2а приводит к уменьшению периода колебаний JJ,ep и увеличению числа переключений п регулятора. Уменьшение числа переключений возможно за счет уменьшения количества энергии, коммутируемой регулятором. Однако при этом следует иметь в виду, что регулирующее воздействие регулятора должно полностью компенсировать самые большие возможные возмущающие воздействия на объект, Увеличение постоянной времени объекта при прочих равных условиях приводит к увеличению периода колебаний и уменьшению частоты переключений регулятора. Из табл. 7.16 следует, что уменьшение диапазона колебаний регулируемой величины при двухпозициоииом регулировании возможно за счет уменьшения количества энергии, коммутируемой регулятором, в результате чего снижается скорость изменения регулируемой величины при переключениях регулятора. Улучшение качества двухпозиционного регулирования путем уменьшения количества коммутируемой pei улятором энергии (или вещества) принято называть методом неполного притока или оттока. Практическая реализация этого метода представлена на примере АСР, приведенной на рис. 7.45. Система поддерживает на заданном значении температуру масла в баке путем подачи горячей воды через змеевик. Температура масла измеряется ртутным злектроконтактным термометром. При неполностью закрытом вентиле By в обходной линии (байпасе) в системе осуществляется истохный «отток» энергии прн закрытии регулирующего соленоидного вентиля СВ. Таким образом, регулятором коммутируется тпк 9 (/ о СВ и x><l-><--tx}- Рис. 7.45. Автоматическая система регулирования температуры масла в баке при неполном оттоке энергии 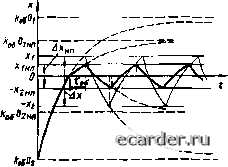 Рис. 7.46. Переходный процесс двухпозиционного регулирования при неполном притоке и оттоке энергии только часть общей энергии, поступаемой в объект. В общем случае при двухпозициоииом регулировании может осуществляться одновременно неполный отток при одном состоянии регулятора н неполный приток при другом его состоянии. Прн этом процесс двухпозиционного peryjшpoвaння имеет вид, представленный иа рнс. 7.46. Система переводится в режим регулирования методом неполного притока и оттока при достижении после включения системы в работу заданного значения регулируемой величины д: = 0. Диапазон колебаний регулируемой величины при этом для объекта с передаточной функцией (7.157) Дмп - кМВш + В2нп)(1 - r°6o6j + -1- 2ае -об/об (7.160) где ЛХщ1« Ах (см. табл. 7.16, п. 11). Средняя скорость изменения значения регулируемой величины может быть снижена Таблица 7.16. Формулы для расчета процесса двухпозиционного pei улироваиия (рнс. 7.41-7.44) Параметры статической характерипики регулятора Передаточная функция объекта Расчетные формулы В = В = В, H = l2 = • т = > •пет) п = Xi = Xj = о; Ах = 2й fco6 Р a(Bi + Bi) 1 1 + ; xi = = a; Дл = 2a 5, = £, = B, ti - h - об in -. Jiiep = 2Гоб in ~--- n = = Xj = a; Дх = 2a Tuep В,ФВ, = Tin e; t, = rin oe-t: (fco6gi+a)(fco6gi + a) (fcoeB, -fl)(fco6B2-a). пер Xi = X2 = a; Ax = 2a B,=B = B, афО U=t2 = 2 To6 + k„f.B 2 (й + /собоб) Ах-= 2{а + кобВгсб) ; jCi = Xj = а + ЛобВТоо; 0 = 0 i = fi = 2тоб; TJiep = 4тоб; " = i- 2Тоб Xi = Хг = коВТаб; Дх = 2ЛобВТоб tl=To6(l + Л 1. BiJ ЛобВз B2 V 2й / 1 J Y fc„6 Ui ВгГ (В, + Bj) [2a + kT (Bi + Bj)] Xi:=a + fcogSiToei = a + обгТоб; 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 [113] 114 115 116 117 118 119 120 121 |
||||||||||||||||||||||