
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 [115] 116 117 118 119 120 121 X ехр . (1 + а) (я - к) и + оп - а J (7.161) где о = fiAi; tt = Тоб/[(1 + а) п - а]; 2 = aW[(l+a)n~a]. (7.162) Отрицательная амплитуда (см. рис. 7.48 и 7.49) -кАв, 1 - ехр( - 1 - ехр 1 - ехр Тоб т + X ехр хехр - to6 Р V Гоб m + рт - Р Гоб m + рт - р «У to6 (l + P)(m-t) " L Тоб m + Pm - P (7.163) Э = (4Аз; з = Хоб/[(1 + Э)т-Э]; u = PW[{i + P)"i-p]- (7.1И в (7.1б1)-(7.164) fcos - коэф([7и«иент передачи обьекта; Sj и Вг - регулирующие воздействия на объект при включении и выключении регулятора соответственно; ть ~-время запаздывания; Тб - постоянная времени объекта; п - число включений регулятора за время запаздывания тб при подключении к генератору импульсов :ia)iuT4iiKa 3di; и /i - длительность импульса и паузы соответственно нри подключении к генератору импульсов задатчика .3di; н t - длительносгь паузы и импульса соответственно при подключений к генератору импульсов задатчика Здз; m - число отключений регулятора за время запаздывания при подключении к генератору импульсов задатчика Здр Диапазон колебаний (7.165) - Из (7.1б1)-(7.1б5) и рис. 7.49 следует, что при двухпозициоииом импульсном регулировании объектов с передаточной функцией (7.157) диапазон колебаний регулируемой величины при соответсгвующем выборе зна- чений аир может быть существенно уменьшен (георетически до нуля) при любом запаздывании в системе. Положительная амплитуда колебаний при двухпозицнонном импульсном регулировании объектов с передаточной фуЕцщией (7.156) >1нмп = fco6To6 [{Bi - аВг)« + В,]/(1 + «)« - а]. (7.166) Отрицательная амплитуда Х2«»и = обТоб [{В2 - РВ,) -Ь Вг]/Х( 1.(- Р) m - р]. (7.167) От имальные значения а и Р иеобходимо выбирать из условий отп = В1мин/В2макс; Рогт = Взмин/Вцяхс. (7.168) где Bjmhh и Взмнн - минимальные регулирующие воздействия на объект соответственно при включении и выключении регулятора при максимальных возмущающих воздействиях; BjaKo и B2Maj((. - максимальные регулирующие воздействия на объект соответственно при включении и выключении регулятора при максимальных возмущающих воздействиях. Для облегчения расчетов по данным табл. 7.17 предложены номограммы, приведенные на рис. 7.51. С их помощью расчет производится в следующей последовательности. По характеристике объекта определяют его коэффициент передачи {сб. постоянную времени Та и время запаздывания тп- Исходя из допустимой положительной амплитуды колебаний регулируемой величины, определяют ее значение в относительных единицах х* (см. п. 1 табл. 7.17, в которую сведены все расчетные данные). Здесь -положительная амплитуда колебаний; В -регулирующее воздействие регулятора, направленное в сторону увеличения регулируемой величины, в приращениях от значения регулирующего воздействия, требуемого для обеспечения заданного значения параметра при отсутствии возмущающих воздействий иа объект. По зависимости а* = /(х*) иомОграммы на рис. 7.51 определяют положительную часть зоны нечувствительности регулятора в относительных единицах и с учетом выражения в п. 2 табл. 7.17 по выражению в п. 3 находят действительное значение oi. По выражению в п. 4 табл. 7.17 находят в относительных единицах отрицательную амплитуду колебаний х5, гае Вг регулирующее воздействие регулятора, направленное в сторону уменьшения pei улируемои величины, в приращениях от зиачения регу- 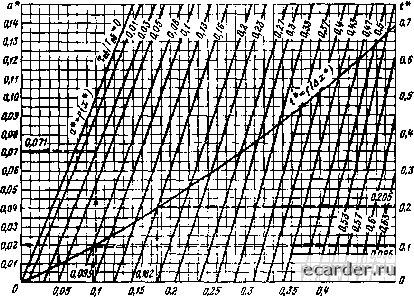 Ц45 х*Лз Рис. 7.51 Номограммы для расчета процесса двухпозиционного регулирования апериодических объектов первого порядка с запаздыванием Таблица 7 17 Парамет!»! двухпозиционного ретулнрования
лирующего воздействия, требуемого для обеспечения заданного значения параметра при отсутствии возмущающих воздействий на объект. По зависимости я* = / (х*) номограммы определяют отрицательную часть зоны нечувствительности регулятора в относительных единицах и с учетом выражения в п. 5 по выражению в п. 6 находят действительное значение «2- По выражению в п. 7 определяют зону 2а нечувствительности регулягора. Затем по выражению в п. 8 определяют диапазон колебаний регулируемой величины в относительных единицах Дх при базовом его значении (кобВ] + Хг). По t* = /(Дх*) номограммы в зависимости от Ах*1 находят время увеличения регулируемой величины в относительных единицах а учетом выражения в п. 9 по выражению в п, 10 иаходяз абсолютное значение ti регулируемой величины. Затем по выражению в п. 11 определяют диапазон колебаний регулируемой величины в относительных единицах Дх? при базовом его значении (кобг + Xi). По I* = / (Дх*) номограммы в зависимости от Дх5 находят время уменьщения регулируемой величины в относительных единицах t, По выражению в п. 13 табл. 7.17 определяют абсолютное значение времени уменьшения tj. По выражению в п. 14 находят период колебаний регулируемой величины Тдд. Рассмотрим несколько примеров расчета АСР с двухпозиционным регулятором. Пример 7Л. Автоматическая система регулирования, представленная на рис. 7.52, осуществляет поддержание заданного уровня 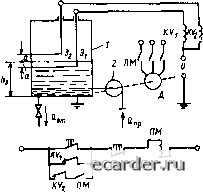 Рис. 7.52. Автоматическая система регулирования уровня двухпозиционным регулятором с зоной нечувствительности: 1 - резервуар; 2 - насос воды в резервуаре. В системе запаздывание озсутствует. Из резервуара вода подается к гготреби-телю с помощью насоса, производительность которого Qor не зависит от уровня жидкости в резервуаре. Заданный уровень воды в резервуаре = 5 м. Центробежный насос, подающий воду в резервуар, обеспечивает производительность „р, равную Сзд.ог« при числе оборотов «зд, равном 50%* номинального числа оборотов пом двигателя: "зд = 0,5«ном- Коэффициент передачи объекта kotj ~ ~ Ю" с". Допустимое число включений двигателя m = 20 вкл/ч. Требуется определить, иа каком расстоянии oTHOCHTeiibHO задалшого уровня К; необходимо установить контакзиые электроды. Так как по условиям задачи производительности нагнетаЮ1цего и отсасываюпгего насосов пракгически не зависят от уровня воды в резервуаре, то объект регулирования в динамическом отношении может быть представлен шгтегрируюшим звеном с передаточной функцией (7.154). В связи с тем что производительность насосов пропорциональна числу оборотов, регулирующее воздействие регулятора в прирагцениях от заданного значения уровня Bi=k (Лвдм - «за» = (2Пзд - "зд) = = кЩи = В2=В, где к - коэффициент пропорциональности. В относительных единицах регулирующие воздействия Bl = («ном - "зд)/«зд = 1 = Вз = в. Так как запаздывание в системе равно нулю, То при ограниченном числе включений двигателя двухнозиционный регулятор должен иметь статическую характеристику с зоной нечувствительности, не равной нулю (2а 0). Таким образом, параметры статической характеристики двухпозиционного регулятора следующие: Bi = B2 = B и а?0. Следовательно, процесс двухпозиционного регулирования объекта с передаточной функцией Щу{р) = коГ>/Р необходимо рассчитывать по выражениям в п. 1 табл. 7.16. Так как диапазон колебаний Ах = Д/i = 2а, то из выражения для числа переключений п регу--чятора (см. п. 1 табл. 7.16) находим АН = 2а = кобВ/п = кобВ/2т. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 [115] 116 117 118 119 120 121 |