
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 [23] 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 Раздел 3 СТРУКТУРА АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ 3.1. КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ Автоматический peiyjisrop - это средство автоматизации, получающее, усиливающее и преобразующее сигнал отклонения регулируемой величины и целенаправлешю воздействующее на объект регулирования, он обеспечивает поддержание заданною тна-чения ретулируемой величины или изменение ее значения по заданному закону. Автоматические регуляторы классифицируются в зависимости от назначения, принципа действия, конструктивных особенностей, вида используемой знертии и др. По BHjiy pei улируемого параметра автоматические регуляторы подразделяются иа регумторы температуры, давления, paipe-жения, расхода, уровня, состава и содержания вещества и т п По конструктивным признакам автоматические регуляторы подрашеляются на аппаратные, приборные, агрегатные и модульные (элементные). Регуляторы аппаратного типа конструктивно представляют собой техническое устройство, работающее в комплекте с Tiep-вичным измерительным преобразователем. Аппаратные автоматические peiуляторы работают независимо (параллельно) от средств измерения данного технологического параметра. Регуляторы приборного тшта работают только в комплекте с вторичным измерительным прибором. Приборные регуляторы не имеют непосредственной связи с первичным измерительным преобразователем. Сигнал об отклонении pei улируемои величины от заданною значения е(т) поступает на вход приборного регулятора от вторичною измерительного прибора. Для этою измерительный прибор имеет задающее устройство, на котором вручную устанавливается требуемое заданное значение регулируемой величины. Заданное значение git) в приборе сравнивается с действительным значением x{t) регулируемой величины, определяемым положением подвижной измерительной системы прибора, и разность c(i) = = g{t) - x{t) подается на вхоц ре1уля1ора. В ряде случаев и само регулирующее устройство приборного типа размещается в одном корпусе с вторичным измерительным прибором Таким образом, регуляторы приборною типа включаются последоватечъно с вторичным измерительным прибором. ДОСТОИНС1НОМ регуляторов приборного типа является то, что В ЭТОМ случае не требуется установка дополнительных Т1ервич-пых измерительных преобразовашлей и прокладка линий связи от них до регуляторов, их не;юстаток - более низкие динамические свойства и надежность ПО сравнению с аналогичными параметрами регуляторов аппаратного типа. Автоматические регуляторы, построенные по агрегатному (блочному) принципу, состоят из отдельных унифицированных блоков, выполняющих определенные функции Входные и выходные сИ1на,1ы Э1их блоков унифицированы. Это позволяет из блоков проек гировать автоматические регуляторы различного функционального назначения. Автоматические регуляторы, тюстроенные по модульно<лу (элементному) принципу, состоят из отдельных модулей (ЭJтeмeн гов), выполняющих простейшие OTiepaunn. Входные и выходные сит налы модулей унифицированы. Эю по)воляет, как и в случае использования агрегатных регуляторов, собирать автоматические регуляторы различного функционального назначения В зависимости от источника HCTiojibiye-мой энергии автоматические per уляторы подразделяются на pei уляторы прямого и непрямого действия. В регуляторах прямого действия одио-врсмешю с измерением pei улируемои величины от обьекта pei улироваиия отбирается часть энергии, которая используется для работы регулятора и воздействия на его исполнительный механизм - регулирующий орган объекта регулирования. Таким образом, к автоматической системе «объект -pei уля-тор>» энергия извне не подводи гея, В автоматических регутяторах непрямою действии для работы регулятора и воз- действия на его исполнигельныи механиш подводится энергия ичвне. В зависимости от вида используемой энергии регуляторы непрямого действия подразделяются на электрические (электромеханические, электронные), пневматические, гидрав тческне и комбинированные (электропневматические, электрогидравлические и т. д.). Выбор регулятора по виду используемой энергии опреде.1яе"1ся характером обьекта регулирования и особенностями автоматической системы. Электрические автоматические регуляторы ттрименяются главным образом для ре-т улирования на невзрывоонасных объектах при больтттих расстояниях от 1тунк1а уттрав-ления до объекта регулирования. Этектрнческие регуляторы (особенно электронные) являются сложной аппаратурой и гребуют высокой квалификации экс-штуатат[Ионно1 о и наладочного персонала, а также оснатцения iKcnJTyaTauHOHHbix служб дорогостоятпими исттыгательными средствами. Пневматические автоматические регуляторы применяются во взрыво- и пожароопасных !онах ттри небольших расстояниях (до 400 м) От пункта ynpaajTCHMB до объекта регулирования. Достоинствами пневматических peтyjтя-юров являются относительпая простота всех зтементов ретуляюра, простота в обслуживании и нaJтaдкe, вфыво- и тюжаробезопас-иость. Недостатками пневматических регулято-рой явjтяютcя необходимость в специальном источнике питания систем пневмоавтоматики сжатым воздухом, высокие требования к очистке воздуха от пыли, влаги, масла и т. д., большая инерционность элементов пневмоавтоматики и линий связи по сравнению с инерционностью электрических рету-ляторов. Гидравлические регуляторы применяются во взрыво- и пожароопасных зонах, как правило, при нетюсредственном размещении элементов регулятора в зоне объекта регулирования. Гидравлические регуляторы надежны в работе, их исполнительные механизмы при небольтттих размерах развивают большие перестановочные усилия. Недостатками гидравлических рет yjTH-торов являются необходимость в специальном источнике питания регулятора рабочей жидкостью (в большинстве случаев - маслом), ограниче1ШОСть радиуса действия, требование полной герметизации всех элементов регулятора и линий свя}и, трудность pedjm3auHH сложных законов регулирования Комбинированные рет уляюры ттриме-няюгся в сггучаях, когда необходимо использовать отдельные преимущества электро-, пневмо- или гид ро регуляторов. Например, если требуется разработать .чвтомат ическую систему рет улирования взрывоопасным объектом при большом удалении пункта управления от объекта, то можно применить электроппевматический ттринтшп регулирования. Первичный измери-1 ejtbhbih ттреобразова] ель, исполнительный механизм и линии связи в пределах взрывоопасных зон выполняют пневматическими, а элементы регулятора на пункте управления и линии связи до объекта управления выполняю т .чект рическими. Сопряжение электрических линий связи с пневматическими осутдествл яют на границах взрывоопасных зон с помощью специальной преобразующей пневмоэлектриче-ской и электропневматической аппаратуры. Так, пневматический сит нал от первичното и (мери т ельнот о т1реобра10ва1еля с тюмотттью пневмолектропреобразоватепя преобразуется в эквивалентный электрический сигнал, который передается по электрическим линиям связи на электрические элементы регу-jTHTopa в пункт yiTpaBJTeHHH, а электрический сит нал от пункт а управления с 1томот][ью электропневмопреобразователя преобразуется в эквивалентный пневматический сигнал, который по пневматическим линиям связи тюступает на пневматический исполнительный механизм ретулятора. По характеру изменения рет улируюптет о воздействия автоматические регуляторы подразделяются па регуляторы с линейным и нелинейным законами регулирования. Примером рет уля горов с нелинейным законом регулирования могут служить по-зицноиные, и в частности двух- и трехпози-ционные, регуляторы. 3.2. ТИПОВЫЕ ЗАКОНЫ РЕ1ЛИРОВАНИЯ Пропорцишальиые регуляторы Степень приближения точки пересечения КЧХ разомкнутой системы отрицательной полуоси к точке (- J, jO) определяет запас устойчивости по модулю с замкнутой автомагической системы регулирования (см. рис. 2.14). При приближении КЧХ к точке В (- 1, jO, рис. 3 1) увеличивается колебательность в замкнутой системе; ттри пересечении этой точки запас устойчивости с=0 и в замкнутой системе будут иметь место незатухаю- 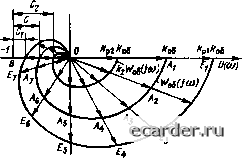 Рис. 3.1. Характер изменения КЧХ разомкнутой системы При изменении ее коэффициента передачи щие колебания; при охвате КЧХ точки В замкнутая система будет неустойчивой. Так как модуль вектора КЧХ системы определяется коэффициентом передачи (усиления) разомкнутой системы иа данной частоте, то степень приближения КЧХ разомкнутой системы можно регулировать путем изменения ее коэффициента передачи к. В соответствии с (2.3) КЧХ разомкнутой системы (рис. 3.2,а) определяется выражение! IV(/o))= Ир(/о))Иоб(;о)). (3.1) где »р(/й>)-КЧХ регулятора; Wo6(№>)-КЧХ объекта. Из (3.1) следует, чго коэффициент передачи разомкнутой системы можно изменять с помошью автомагического регулятора, если его комплексная частотная характеристика будет иметь вид WpO(o) = fep, (3.2) где /ср - коэффициент передачи рет уля гора, являюшийся его параметром настройки. Рассмотрим более подробно, что понимается под термином «параметр насгройки» регулятора. Из критерия устойчивости Рауса -Гур-вица следует, что постоянные коэффициенты дифференциального уравнения эвена, системы или устройства в значительной мерс определяют их динамические свойства. В связи с этим в автоматических ре-i уляторах предусматривается возможность изменения нек01 орых коэффм1шентов ет о дБфференпиальиого уравнения, называемых параметрами настройки регуляторов. Такими параметрами настройки являются «коэффициен! передачи регулятора к», «постоянная времени предварения Тпв», «постоянная времени изодрома Г», «постоянная времени дифференцирования Гд». «постоянная времени интегрирования Т„». Изменяя значения этих параметров настройки регулятора, тем самым изменяют его динамические характерисгики с це;тью обеспечения требуемого качества работы автоматической системы регулирования в целом. Значения параметров настройки регулятора, при которых достигается наилучшее качество работы системы, называются оптимальными. Для изменения параметров настройки в регуляторах имею1ся органы настройки (управления) в виде ручек, переключателей и подобньх элементов со шкалами положений органов настройки и оцифрованными значениями параметров иастройси в этих положениях. Следует отметить, что значительная часть регуляторов выпускается заводами-изготовителями с неоцифрованными шкалами положений органов настройки. В этом случае при выполнении наладочных работ на технологическом объекте предварительно в лабораторных условиях К(Р) W(p) 9(i) 9(t) wa(p) Kip) Ks(p) K(p) Рис. 3.2. Структурные схемы АСР: а - разомкнутой системы по ханалу задающего воздействия; б - то же, но замкнутой системы; в - замкнутой системы, но по каналу возмущающего воздействия; г - замкнутой системы, но по каналу ошибки регулирования 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 [23] 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |