
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 [25] 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 По структуре ПИ-регулятор эквивалентен параллельному соединению П-регуля-тора с передаточной функцией Wn (р) = /ср и И-регулятора с передаточной функцией W»ip)=l/T„p (рис. 3.4,а). Если при настройке ПИ-pei улятора установить очень больпгое значение постоянной времени Гн, то он превратится в П-регу-лятор. Если при настройке регулятора установить очень малые значения кр, ю получим И-регуляюр с коэффициентом передачи по скорости 1/Ти. Переходная характеристика ПИ-pei улятора с передаючной функцией (3.20) представлена на рис. 3.5 (прямая /). При скачкообразном ишенении регулируемой величины на 5начение x = Xf, = E(, идеальный ПИ-регулягор сначала мгновенно перемещает исполнительный механизм на величину kpSfj, пропорциональную отклонению регулируемой величины, после чего исполнительный механизм регулятора дополнительно перемещается в гу же сторону со скоростью fig/T,,, пропорциональной отклонению регулируемой величины. Следова-  \ЩР)]Г  Рис. 3.4. Структурная схема идеальных ПИ-регуляторов: о-с передаточной функцией 3 20); 6 -с передаточной функцией (322) ZftpSo---- 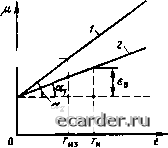 рис. 3.5. Закон ПИ-регулирования регуляторов с передаточной функцией (3.20) (прямая 7) и с передаточной функцией (3 22) (прямая 2) при поступлении на вход постоянного сигнала Ео и при одинаковом значении коэффициента передачи ftp регуляторов тельно, в ПИ-регуляторе при отклонении регулируемой величины от заданного значения мгновенно срабатывает пропорциональная (статическая) часть pei улятора, а затем воздействие на объект постепенно увеличн-ваегся под действием интегральной (асгати-ческой) части регулятора. Параметрами настройки регулятора являют ся коэффициент усиления кр и по-сгоянная времени интегрирования Т. ПИ-регулятор со структурной схемой, приведешюй на рис. 3.4, а, и передаточной функцией (3.20) имеет ие зависящие друг от друга параметры настройки кр и Тд. Кроме схемы на рис 3.4,0 на практике щироко применяется структурная схема ПИ-ре1ули10ра, представленная на рис. 3.4,6. Схема на рис, 3,4,6 реализует закон ре-Iулирования вида (3.21) и1 , Постоянную времени Тиз принято называть (по терминологии заводов-изготовителей) постоянной времени изодрома или просто временем изодрома. Передаточная функция регулятора WhhCp) = кр{Т„,р + 1)/Т„р. (3.22) Таким образом, ПИ-раулятор со структурной схемой, приведенной на рис. 3.4,6, имеет взаимосвязанные параметры настройки статической и астатической частей по коэффициенту усиления кр. Так, прн настройке коэффициента усиления к будет изменяться и постоянная времени ингетриро-вания: (3.23) Рассмотрим физический смысл постоянной времени изодрома Т„т Предположим, что на вход peiyjifliopa с законом ПИ-регулирования (3.19) поступил постоянный сигнал £„. Так как постоянную величину можно выносить за знак интеграла, то при этом выражение (3.19) можно TanHcaib в виде ц = Лрео(1 +г/Т„з). (3.24) При поступлении на вход регулятора постоянного сигнала е = в начальный момент (f=0) мгновенно срабатывает пропорциональная составляющая и на выходе регулятора появляется сигнал ц=крЕ.(,. В дальнейшем по шкону (3.24) линейно на- 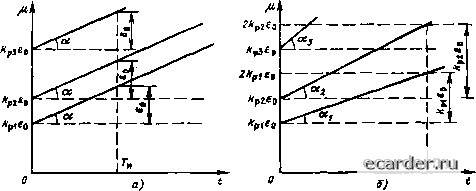 Рис. 3.6. Характер изменения законов ПИ-регулирования прн различных постоянных значениях коэффициента усиления kj, регуляторов: а - для регуляторов с передаточной функцией (3.20); б - для регуляторов с передаточной функцией (3.22) чинает нарастать выходной сигнал от интегральной составляющей и при t = Т„ достигнет значения (ij = Ikpq. Таким образом, постоянной времени изодрома регулятора с ПИ-закоиом регулирования (3.21) иазываекя вршя, в течение которого от действия иите1ральной (астатической) части регулятора удваивается пропорциональная (статическая) составляющая закона регулирования. На рнс. 3.5 показаны переходные характеристики в ПИ-ре1уля10рах (3.19) и (3.21) при поступлении на их вход постоянного сигнала при одинаковых значениях коэффициента усиления кр. Из рис. 3.5 хорошо видеи геометрический смысл постоянной времени интегрирования регулятора (3.19) и постоянной времени изодрома регулятора (3.21). На рис, 3.5 приведены законы ПИ-регу-лнрования при kp>i. Если itp < 1, то угол наклона интегральной составляющей 1 закона ПИ-регулироваиия (3,19) будет больше угла наклона otj интегральной составляющей 2 закона ПИ-регулирования (3.21). В этом случае прямая / пойдет выше прямой 2. На рис. 3.6 показаны законы регулирования (3.19) и (3,21) при различных значениях коэффициент усилеипя кр реуляторов (ipi > р2 > fcpj). Из рис. 3.6,0 видно, что при законе ПИ-ретулирования (3./9) скорость нарастания ик1е1ральной составляющей на выходе регулятора прн изменении кр не изменяется. При законе ПИ-регулнрования (3,21) в случае изменения ftp пропорционально изменяется и скорость нарастания интегральной составляющей на выходе регулятора. Пропорциональио-дифферащиальные регуляторы Про пор ционал ьно-д иффереициал ьные регуляторы (ПД-ре1улягоры) оказывают воздействие на объект регулирования пропор-ционаЬно отклонению регулируемой величины и ее скорости: М=М+7~д-- (3.25) Постоянная времени Тд называется постоянной времени дифференцирования. Она определяет величину cocтaвJГЯющeй регулирующего воздействия по скорости. Ре-г5лятор предстнвляег собой параллельное соединение усштигельыото и идеального дифференцирующего звеньев. Передаточная функция регулятора (3.26) Пропорционально - дифференциальные регуляторы, так же как и ПИ-регуляторы, мо-lyi иметь структурную схему с общим коэффициентом усиления кр. В этом, счучае закон ПД-ретулировання запишется в виде (3.27) ПостоянЕтая времени Т„в называется постоянной времени предварения. Передаточная функция регулятора имеет И11д(р) = р(1 +W). (3.28) 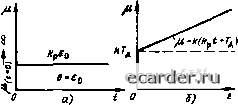 от этого 01клонеиия н скорости иэменения регулируемой величины; Рис. 3.7. Закои ПД-pei улирования: 0 -при поступлении на вход регулятора постоянного сигнала; б - при поступлении снишла е (Г) = kt При поступлении на вход идеального ПД-регулятора постоянного сигнала Cq на выходе мгновенно появляются бесконечно большой сИ1нал от действия дифференцирующей составляющей закона ПД-pei улирования и сигнал от пропорциональной составляющей Ццроп = рЕо- Сигнал от дифференцирующей составляющей сразу падает jo нуля, а or пропор-циoнajiьнoй составляющей остаегся постоянным н равным первоначальному. Цпрол ~ кЕ (рис. 3.7, й). На первый взгляд может показаться, что при гаком действии дифференцирующей ча-С1И нет практического резулыата. В действительности введе1ше в закон регулирования дифференцирующей составляющей сушес! -венно повышает «)фскт действия pei улятора. Дело в том, что при поступлении на объект возмущающею воздействия в связи с инерционностью объек1а отклонение регулируемой величины от заданного значения нарастает пос1епеино и при дифференцировании этою отклонения получасеся его конечное значение и по абсолютному значению, и по длителыюсти. Если, например, отклонение регулируемой величины 01 заданного значения происходит по закону X = kt, то дифференциальная сос1авляющая закона ПД-регулироваиия сразу примет значение Цд = (TJ для pei улятора с законом (3.25) или \1ч = ккрТг,п для ре- 1 улятора (3.27). Пропорциональная составляющая булс! медлснпо napaciaib по линейному закону ц„ро„ = kkj,t. Переходный процесс в ПД-регуляторс при поступленни на его вход cuinajia x = kt представлен на рис. 3 7,5, Пропориноналыю-янгегрально-днфференцнальные регуляторы Э1И регуляторы воздействую! на объект регулирования пропорционШ!Ьно отклонению е регулируемой величины, интегралу \1 = кре + Edt + Т, (3 29) Пример структурной схемы ПИ-регуля-юра дан на рис. 3.8, а. Так же как и для законов ПИ- и ПД-регулировання, структурная схема ПИД-pei уля гора может иметь разно-видност и с общим коэффициен i ом усиления для различных составляющих закона регу-лирова1Шя. Закон регулирования при jto.m может HMeih вид zdt + Т„ (3.30) Передаточная функция ПИД-регулятора (3.29) имеет вид »пид(Р) = tp + 1/7 иР + Тр. (3.31) Передаточная функция ПИД-регуляюра (3.30) имеет вид ИпидСр) = Лр(1 + 1/7-«,р + ад (3 32) При скачкообразном ишеиении регулируемой величины идеальный ПИД-регулятор в начальный момент времени оказывает мпювенное бесконечно большое воздействие на объект регулирования; затем величина воздейс1ния мгновенно падает до }начения, определяемого пропорциональной частью регулятора, после че! о, как и в ПИ-ре-1уляторе, постепенно начинает оказывать свое влияние астатическая часть регулятора (рис. 3.8, а). Параметрами настройки ПИД-ре! улятора (3.31) являются коэффициент пропорциональности регулятора кр, постоянная 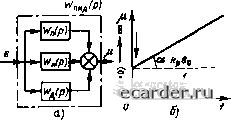 Рис 3.8. Пример структурной схемы ПИД-pei улятора (а) н закона ПИД-регулирования при поступлении на вход регулятора постоянного СИ1 нала ь it) = Eq (б) 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 [25] 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |