
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 [26] 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 Таблица 3.1. Характеристики типовых ПИ-, ПИД-регуляторов и дифференциаторов характеристики Характеристика регулятора типа дифференциа i ори Уравнение У = к, У = К \ X + -- т У-+у = к т - + V,, Передаточная функция 7;р+1 Переходная характеристика h(i) h(t) О /L,  КЧХ »(/0)) Л (со)  Ф(со)    времени интегрирования Т„ и постоянная времени дифференцирования Гд. Параметрами настройки ПИД-регулятора (3.32) являются кр, 7"„т и Тпв- Для таких регуляторов постоянные времени интегрирования Т\=Т/кр и диф ференцирования 7" = kpTn зависят от коэффициента передачи регулятора. ПИД-регулятор по возможности на-сгройкн является более универсальным по сравнению с другими регуляторами. С его помошью можно осуществлять различные законы регулирования. Так, при Тд = О и бесконечно большом значении 7"„ (3.31) nojTy4aeM П-риулятор (3.4); при fep = 0 и Тд = 0 получаем И-peiy-лятор (3.13); при fcp = 0 и Гн =-х> получаем Д-регулятор (3.16); при Гj = О получаем ПИ-регулятор (3.20); при бесконечно большом значении Т„ и конечных значениях кр и Гд получаем ПД-регулягор (3.26). Характеристики наиболее широко применяемых ПИ- и ПИД-регуляторов, а также дифференциаторов приведены в габл. 3.1, 3.3. СТРУКТУРНЫЕ СХЕМЫ АНАЛОГОВЫХ ПРОМЫШЛЕННЫХ РЕГУЛЯТОРОВ В § 3.2 описаны типовые законы регулирования идеальны х ав гоматическнх регуляторов. Однако при реализации реальных автоматических регуляторов не всегда точно удается обеспечить тот или иной желаемый типовой закон регулирования. Это объясняется в первую очередь инерционностью исполиительных механизмов, а прн реализации дифференциальной составляющей закона регулирования - невозможностью практической реа;шзации идеального дифференцирующего звена. В связи с этим важно определить степень погреишосги в формировании законов регулирования промышленными регуляторами. Рассмотрим общий принцип построения желаемой структуры автоматических регуляторов. При охвате какого-либо участка схемы с передаточной функцией Wy {р) состоящего из нескольких звеньев, отрицательной обратной связью W, (р) в соответствии с (2.39) передаточная функция laKoro соединения будет равна (3.33) (3.34) (3.35) выражение (3.4) приближенно можно записать в виде W(j,) к 1/Wo dp)- (3.36) При обеспечении условия (3.35) возмож-ност ь представления схемы в виде передаючной функции (3.36) дас! важный практический результат, зaкJючaюшийcя в том, что динамические свойства схемы (3.33) илн участка схемы, охваченною обратной связью, ие зависят от динамических свойств элементов прямого участка и определяются только динамическими свойствами условного звена с передаточной функцией, равной обратной передаточной функции канала обратной связи. Эта идея широко используется на практике при разработке структурных схем автоматических регуляторов, а также для улучшения динамических свойств АСР, ликвидации отрицательного влияния на динамические свойства системы тех или иных ее звеньев и элементов. Проп1фционалы1ые регуляторы Идеальный П-pei улятор имеет передаточную функцию вида (3.4), Реальный аналоговый промышленный регулятор должен иметь усилительное звено с передаточной функцией Wy(p) = ky и исполнигельное устройство, например в виде электрического исполнительного механизма (ИМ) с передаточной функцией Whm(p) = 1Тимр. Электрический ИМ является интегрирующим jbchom (3.13), и, следовательно, для получения П-за-кона регулирования его необходимо охватить отрицательно обрат ной связью. Для обеспече1ШЯ условия (3.35) с целью повышения коэффициента передачи прямого канала этой отрипагельной обратной связью следует охватить и усилительное звено с перс-даточной функцией Wy{p) = ky регулятора. Требуемую передаточную функцию канаста обратной связи найдем из условия (3.36): откуда Wn(p) = kp=\/Wo,{p), Wo с(р) = lAp = ко (3.37) Таким образом, канал обрат ной связи должен быть выполнен в виде усилительного звена с коэффициентом передачи ко=1/кр, т. е. равным обратному значению коэффициента передачи П-регулятора, с учетом изложенного структурная схема реального П-регулятора должна иметь вид, представленный иа рис. 3.9, а Оценим точность реализации П-зако-на регулирования реальным П-регулятором со структурной схемой, приведенной на рис. 3.9,0. С учетом (2.36) и (2.39) найдем передаточную функцию П-pei улятора: 1 + Ayfco JThmP кос(ГимР/Мос+1) (3.38) Таким образом, реальный П-регулятор со структурной схемой на рис. 3.9, д представляется в виде последовательною соединения П-регулятора с передаточной функцией Ип(р) = Лр = 1Дос (3.39) и некоторого балластного звена с передаточной функцией W6{p)=innp + 1). (3.40) Балластное звено является апериодическим звеном (см. табл. 2.1) Коэффициент передачи балластного эвена равен единице, а постоянная времени Гб = ГимДЛс- (3.41) 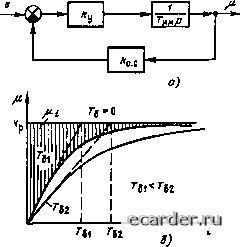 Рис. 3.9, Структурная схема П-регулятора (а) и реализуемый сю закон П-регулирования (б) Переходная характеристика реального П-регулятора со структурной схемой, приведенной на рис, 3,9, я, представлена на рис 3 9,6. Параметром настройки регулятора яв-.1яется коэффициент передачи Jo с устройства обрат!юй связи. Чем меньше (больше) с "ем болыпе (меньше) коэффициент кр передачи регулятора (3.39). Одновртеино следует иметь в виду, что чем больше кр, гем больше постоянная времени (3.41) балластного звена и тем больше искажается идеальный закон П-регу-лировання. Для уменьшения влияния балластного звена при конструировании П-регулятора по структурной схеме, приведенной на рис. 3.9, й, следует стремиться к максимально возможному значению коэффициента усиления ку. Текущее значение ц, динамической ошибки реализации закона П-регулирования при Tf 7о1 показано на рис. 3,9,6. Пропороиояалыю-ннтегральные регуляторы Идеальный ПИ-pei улятор имеет передаточную функцию, определяемую выражением (3.31) или (3.32), При применении в регуляторе ИМ с передаточной функцией Иим (Р) = i/ТкмР структурная схема регулятора может разрабатываться в нескольких вариантах, основные из которых представлены иа рис. 3,10. По структурной схеме, приведенной на рис. 3.10,«, формирование ПЙ-закона регулирования осугцествл яется так же, как и в идеа.1ьных ПИ-регуляторах (см, рис. 3.4). Для уменьшения отрицательного влияния на закон ПИ-регулирования исполнительного механизма ст о охватывают отрицательной обратной связью в виде усилительного звена с передаточной функцией с(Р) = с Передаточная функция реального ПИ-регулятора со структурной схемой, приведенной на рис. 3.10,0, запишется в следующем виде; 11/ f 11/ /1 1/7имР Ир(р) = Ипи (р) --7Р-= = Ипи(р) ТбР+\ (3.42) 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 [26] 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |