
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 [27] 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 Го + 1 4> Рис. 3.10. Структурные схемы промышленных ПИ-рсгуляторов Таким образом, реальный ПИ-pei улятор со структурной схемой, приведенной на рис. 3.10, а, реализует закон ПИ-регулирования с погрен1ностью, определяемой балластным апериодическим эвеном (3.40). Постоянная времени балластного звена Тб = ГимАс.с- (3.43) Из (3.43) следует, что чем больше к , тем меньше и тем меньше погрешность реализации закона ПИ-регулировання. Однако прн этом следует иметь в виду, что при увеличенни к, умешшается коэффициент передачи ПИ-регулятора, который согласно (3.42) равен огношению Лр/о.с- Для сохранения требуемого значения коэффициента передачи регулятора одновременно с увеличением fco.c следует пропорционально увеличивать ftp. На рис. 3.10,6 приведена структурная схема, в которой закон ПИ-регулирования реализуегся за счет динамических свойств канала обратной связи, охватывающего усилительную часть регулятора. При соблюдении обоими каналами обратной связи, показанной на рис. 3.10.(5, условия (3.35) согласно (3,36) необходимая передаточная функция канала обрапюй связи может быть найдена нз выражения 1 1 Ио.с(р) К откуда Ио.с(р) = «о. с ИпиСр) Если, например, передаточная фучкщм регулятора определяется выражением (3,22), то из (3.44) получаем WMkTpl(Tp + \), (3.45) к- Ipo.o Т- Тит- Таким образом, для того чтобы структурная схема на рис. 3.10,6 реализовала ПИ-закон регулирования (3.21), необходимо каиал обратной связи, охвагывающий усилительную часть регулятора, выполнить в виде реального дифференцирующего звена (3.18). На рис. 3.10, в приведена структурная схема, в которой закон ПИ-регулировання реализуется за счет динамических свойств кана.1а обратной связи, охватывающего как усилительную, так и исполнительную часть регулятора. Необходимая передаточная функция обратной свяш в этом случае, гак же как и для схемы на рис. 3.10,6, должна определяться выражением (3.45), но при к = 1/fcp. На рис. 3.10, г приведена структурная схема регулятора, имеющая прнн1№пиа.тьное отличие от схем иа рис. 3.10,а -в, заключающееся в том, что в ней динамические свойства интегрирующею исполиительиого механизма использованы дпя формирования закона ПИ-pei улирования. В этом случае необходимую передаточную функцию канала обратной связи можно найти из условия Если передаточная функция peiулятора определяется выражением (3.22), то ♦пир ТуолР ~ кр{Ту,р+\) ТимР Wo.c(p) = V(7"p + l), Таким образом, в качестве обратной связи в структурной схеме на рнс. 3.10, г для обеспечения закона ПИ-регулирования применяют апериодическое )вено (см. табл. 2.1). Точные передаточные функции peiyjiA-торов со структурными схемами, приведенными на рис. 3.10,6 -г, а следовательно, и передаточные функции балластных звеньев, искажающих закон ПИ-регулирования, могут быть определены так же, как для регулятора со структурной схемой, приведенной на рис, 3.10, а. Переходные процессы в рет уляторе со структурной схемой, приведенной иа рис. 3.10,а, представлены на рис. 3.11. Из (3.42) и рис. 3.11 видно, что чем меньше постоянная времени балластного звена, тем меньше потрепшость реализации закона ПИ-регулирования. При Тб=0 и01 рет1тность будет равна нулю. Так как исполни тeJтьныи механизм peiy-тятора при монтаже располагается непосредственно у объекта регулирования, а атитара-турпая часть ретулятора размещается, как ттравило, в пункте управления объектом, то ттри выборе структурной схемы регулятора при прочих равных уатовиях следует иметь в виду, что схема на рис. 3.10,г требует меньшего расхода кабельио-провощшковых материалов (при злектрическом исполнительном механизме) или труб (при пневмагическом или I идравлическом исполни т елтьном механизме). Следует отметить, что балластное звено в виде апериодического звена (3 40) как в ПИ-рет уляторе (3.42), так и в П-регуляторе (3.38) часто оказывает положительное влияние на процесс pei улирования Так, при кратковременных отклонениях регулируемой величины бJтaгoдapя демпфированию бал-ластното звена исполнит елтьный механизм автоматической системы с таким регулятором не срабатывает, что повышает срок его службы 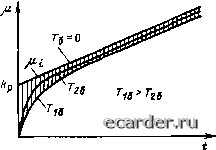 С учетом этого в современных регуляторах типа «Каскад», АКЭСР предусматриваются даже специальные демпфирующие устройства входного сигнала (см. далее, § 4.2 и 4.4). Пропор1Ц10нально-интегральио-дифференциальные регуляторы Пропорционально - интегрально - дифференциальные рет yJтятopы могут быть сконструированы по структурной схеме идеального ПИД-рсгулятора (см. рис. 3.8, й). Так как фактическая реализация идеального дифференцирующего звена в общем случае представляет бо-Ь1иие трудности, то в практических схемая используется реальное диффе-ренцируютцее звено (3.18). Длтя уменьшения пот решности в реализации закона ПИД-ре-гулировапия иитолнительныи механизм, как и в случае реализатщи закона ПИ-регулиро-вапил 1Ю схеме рис. 3.10, а, охват ывается отрицагелтьной обратной связью с передаточной функцией Wi{p) = koc С" учетом эт от о структурпая схема такого реального ПИД-регулятора имеег зид, представленный на рис. 3 12, а. Передаточная функция регулятора "о с \ иР KinP ТдР+1/ (ТимАо Jp + 1 Wp(p) = I /Ср + -- + ГлРд б(р) иР W6ip), (3.46) Рис. 3.11. Характер реалтизации закона ПИ-регулироваиия регулятором ео структурной схемой, приведенной на рис. 3.10, й 6(Р) = kJ{Tj> + 1); We (р) = к/{ТеР + 1); Сравнивая передаточную функцию (3.46) реального ПИД-рет улятора с передаточной функцией (3.31) идеального ПИД-регулятора, видим, что регулятор со структурной схемой па рис. 3.46, а реализует закон ПИД-регу-лирования с погрешносгью, определяемой передаточной функцией Wf,(p) балластного звена, и. кроме того, Д-составляющая закона рет улирования реализуется с дополнительной погрешностью, оттределяемой функцией б(р) второго ба:итастиого звена. При coбJTюдeнии условия (3 35) приближенную ттередаточную функцию (3.46) можно <8Н2) и То Jamil
Ta*1 Рис. 3.12. Характер реализации закона ПИД-регулирования ре1улятором со структурной схемой, приведенной на рис. 3.11, а записать в виде (3.47) Параметрами настройки ПИД-pci улятора являются кр, Гн, кц и Гд. Сравхгавая структурные схемы на рис, 3.10,0 и ЪЛ2,а, видим, что реальный ПИД-рс1 улятор со структурной схемой на рис. 3.12,а получапся из структурной схемы на рис. 3.10,0 реального ПИ-регулятора при включении параллельно звеньям, форшфую-щим закон ПИ-регулирования, звена с передаточной функцией ,(p) = cдГяp/(Гдp + l). (з.48) Такой метол формирования закона ПИД-регулирования широко применяется прн разработке регуляторов. Примером этого может служи гь также ПИД-регулятор со структурной схемой, приведенной на рис. 3.12,6, при ее сопоставлении со структурной схемой на рис. 3.10,6 ПИ-регулятора. Для практической реализации закона ПИД-регулирования применяются или ПИД-рсгуляторы (рис. 3.12,а и 6) или ПИ-ре-гуляторы (рнс. 3.10, а и 6) в комплекте с дифференциаторами (3.48). На рис. 3.12,в представлена С1руктурная схема, в которой закон ПИД-регулирования реализуется за счет динамических свойств канала обратной связи, охватывающего как усилительную, так и исполнительную часть регулятора. При соблюдении условия (3.35) в соответствии с (3.36) запишем Ир(Р)=1/о.с(р). При желаемой передаточной функции регулятора, определяемой выражением (3.32), найдем W,Ap) = Т„,р/[к,.(Т„,Т„р + Т„,р + 1)]. (3.49) Так как переходный процесс идеального ПИД-рсгулятора не колебательный, то сомножитель в скобках знаменателя выражения (3.49) ыожно записать в виде ТТиУ + Т„р + 1 = (Т,р -I- 1)(ГгР + 1), Г, , = - 1 1 4 7л в кэГпв -± пв \ 4Гтл, Ги С учетом этого выражение (3.49) запишется в виде (3,50) TiP + 1 Гзр -Ы где к = ГизАр. Таким образом, для реализации ПИД-pei улятора со структурной схемой, приведенной иа рис, 3.12, необходимо, чтобы канал обратной связи состоял из последовательно включенных апериодического и реального дифференцирующего звеньев. Так как усгювие (3.35) в структурной схеме на рис. 3.12, в реализуется приближенно, то исполнительный механизм вносит искажения в закон ПИД-рагулирования. Фактическая реакция ре1"улятора на ступенчатое входное воздействие имеет вид кривой / на рис. 3.13 при идеальной реакции ПИД-регулятора, представленной прямыми 2. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 [27] 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |