
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [28] 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 Рис. 3.13. Характер реализации закона ПИД-регулирования регулятором со структурной схемой, приведенной на рис. 3.11. а Таким образом, реальные ПИД-регуля-торы со Структурными схемами на рис. 3.12 реализуют законы ПИД-регулнроваиия с по-)ре!иностью, зависящей от степени соблюдения условия (3.35) и параметров настройки дифференцирующей части (3.48) в схемах на рис, 3.12, а н 6. Следует отме i и гь, что промышленные ПИД-регуляторы со структурными схемами на рис. 3.12, а и 6 могут реализовать различные законы регулирования с любым сочетанием из П-, И- и Д-составляющих закона ПИД-регулирования. 3.4. ИМПУЛЬСНЫЕ РЕГУЛЯТОРЫ С ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ ПОСТОЯННОЙ СКОРОСТИ в автоматических системах регулирования широкое применение в качестве исполнительных механизмов находят электродвщ а-тели с постоянной частотой нрашения выходного вала. Исполнительные механизмы с постоянной частотой вращения выходного вала осуществляют перемещение pei улирующего органа (РО) с постоянной скоростью. В связи с этим в 1ехнической литературе принято называть такие ИМ исполнительными механизмами постоянной скорости. Исполнительный механизм постоянной скорости может находиться только в трех состояниях: пере.мещение РО с постоянной скоростью S, неподвижность, перемещение РО в обратную сторону с постоянной скоростью. Без учета времени разгона и торможения статическая характеристика d/dl=f{Z) (3.51) такого исполнительного механизма в ком-  Рис. 3.14. Статические характеристики ИМ постоянной скорости (а), постоянной ско-ptKiH в комплекте с электромагнитным пусковым устройством (б) и характер перемещения ИМ постоянной скорости при поступлении на ею вход серии постояштых импульсов (в) плекте с его пусковым устройством имеет вид, представленный на рис. 3.14, а. Анали1ически статическая характеристика запиигется в виде системы d/di = S при Z > Днч /2; d/dt=G при 7<Д„ч/2; d/dt--S при Z<Ah,,/2, (3.52) !де Д„ц - зона нечувствительности пускового устройства; d]ildt - скорость перемещения РО; Z - сигнал на входе пускового устройства. В качестве пусковых устройс1в, как правило, используются релейные электромагнитные аппараты (магнитные пускатели, электромаг нитные реле и т. п.). Так как электромагнитные аппараты срабатывают при большем, а отпуск происходит при меньшем значении входного сигнала, ю статическая характеристика исполнительного устройства (пусково! о устройства с электродвигателем с постоянной частотой вращения) при этом примет вид, представленный на рис. 3,14,6. Из с та i ической характеристики на рис. 3,14, б видно, что электродвигатель включает ся при входном сигнале Z > Д,; /2, а отключается при меньшем абсолютном значении входного сигнала, т.е. ]Z\< < Днч/2 - Дц, где Дв - значение зоны воз- врата или зоны неоднозначности релейного аппарата. Статическая характеристика исполнительною механизма постоянной скорости является существенио нелинейной. Ее нельзя линеаризовать с достаточной для практических расчетов точностью при различных диапазонах изменения входного си1нала Z Однако такой исполнительный механизм может иметь достаточно близкие к линейным характерисгики при релсйно-им-пульсном изменении exoiiHoro сигнала. Подадим на вход испо;н[ительного механизма с постоянной частотой вращения импульсы напряжения с периодом следования Тер и скважностью у = Д1„м1,/Гпср. (3.53) где Т„ер = ДГймп + Alnijj - период следования импульсов; Дьмп - длительность импульсов; ДГпвуз - длительность пауз Во время поступления импульса исполнительный MexaHHjM (ИМ) будет перемещать РО с посюянной скоростью d\i/dt = S = tga (рис. 3.14, и). Во время науз ИМ будет неподвижен. При поступлении иа ИМ серии импульсов характер его перемещения будет иметь вид, представленный на рнс. 3.14, к. Средняя скорость перемещения РО будет равна dn/dt = tg& = AU,„S/T, или с учетом (3.53) dii fdt = yS. (3.54) Преобразовав (3.54) по Лапласу, получим Иим (Р) = М (р)/Г (р) = S/p. (3.55) Таким образом, по каналу «скважность следования импульсов - усредненное пере-мешение РО» исполнительный механизм постоянной скорости можно представить интегрирующим звеном с передаточной функцией (3.55). Из рис. 3.14,6 видно, что при данной скважности у следования импульсов, peajiH-зация закона И-регулирования будет тем гочнее, чем меньше Димц и Дпауз. Однако при зюм повыщается частота включений ИМ, а следовательно, и его износ. Если испа11ните.оьный механизм с пусковым устройс1вом охватить обратной связью (рис. 3.15,и) в виде усилительного 1вена с передаточной функцией dp) = l. то при р&1ейно-импульсном регуляторе с ИМ постоянной скорости можно рсалишваь закои П-рсгулирования При поступлении на вход регулятора рассогласования е>Д„,/2 ИМ включися и будет перемешать РО с постоянеюй скоростью S в сторону ликвидации рассогласования Е. Перемеы]ение р регулирующею органа через канал обратной связи передается в виде си1 нала обратной связи С уменьпгая результирующий сигнал а = Е -, воздействующий иа релейный элемент. При ст<Днч/2-Дв исполни [ельный механизм отклюЧ1£ТСЯ. Таким образом, при каждом изменении е>Дач/2 ИМ будет перемещать РО, ликвидируя с точностью I а I < Д„ч /2 отюшнение с от заданно! о (нулевою) значения, Так как сигнал обратной связи = сЦ, то в установивн1емся состоянии (3.56) Так как зона нечувствительности регулятора имеет небольшое значение, то выражение (3.56) приближенно можно записать в виде откуда £ = сЦ = О, W(p)=M{p)/E(p)=l/koc. (3 57) Таким образом, импульсный регулятор с ИМ постоянной скорости со с1руктурной схемой, приведешюй иа рис. 3.15, о, приближенно реализует П-закон регулирования с коэффициентом передачи кр = 1/ко о- На рис. 3.15,6 показана переходная характеристика регулятора со структурной схемой, приведенной иа рис. 3.14, а, при поступ-  tga =я рис. 3.15. Структурная схема импульсного П-регулятора с ИМ постоянной скорости (а) н его закон регулирования (б) при е (t) = 1 (в) лении на его вход единичного ступенчаюго СИ1 нала 8 (г) = 1. Полученная передаточная функция (3.57) соответствует условиям (3.35) и (3.36), а П-регулятор со структурной схемой на рис. 3.15,а - П-регулятору со структурной схемой на рис. 3.9, а. С помощью импульсного рет улирования можно реали ювать закон ПИ-регулирова-пия по структурной схеме, приведенной на рис. 3.16. а, В этом случае релейный усилитель со статической характеристикой, приведенной па рис 3.14,6, при включении ИМ охватывается отрицательной обратной связью в т)иде апериодического звена с передаточной функцией При постуттлтении на вход регулятора, например, постоянного сигнала е > A,,l/2 релейный уси.титепь срабатывает и включает ИМ, выходной вал которот о начинает вращаться с постоянной частотой, перемещая регулируюттшй орган автоматической системы регулирования (на рис. 3.16 не ттока-зан) в сторону ликвидации отклонения регу--тируемой величины от заданною значения. Одновременно с подачей постоянного напряжения U = Z на ИМ гo напряжение (или его часть) подается иа устройство обратной связи. В качестве устройства обратной связи в 6oJTbiuHHCTBe современных регулирующих устройств исполыуются RC-цетти. Так как устройство обратной связи в схеме на рис 3.16,а при включении ИМ является апериодическим звеном (см. табл. 2.1), го при ттоступлении на ею вход, например, постоянного напряжения Uв = \Z\~\A \ на выходе появляется напряжение /цы = С. возрастающее по экспоненте / (рис. 3.1б.в). Это напряжение направлено встречно наттряжению входного СИ! нала е, в результате чего результирующее напряжение а = е - , поступающее на вход релейною усилителя, начинает уменьшаться. При уменьшении ст до значения ст = = е - С < Aii.i/2 - Да релейный элемент усилителя отключится (см. рис. 3.14,6). ИМ остановится, напряжение на входе канала обратной связи будет равно нулю (Z = 0). После чтого конденсатор С цепи обратной связи начнет разряжаться через резистор и выходное напряжение [/вых = С начнет уменьшаться по экспоненте 2 (рис. 3.16. в). Напряжение ст начнет возрастать, и при ст>Дц,,/2 релейный усилитель снова сработает. ИМ включится и на вход ка.нз.ла обратной связи будет подано постоянное напряжение и„у - Z. Напряжение на выходе канала обратной связи снова начнет возрастать тто экстюненте, Далее процесс периодического включения и выключения (автоколебательный ре- 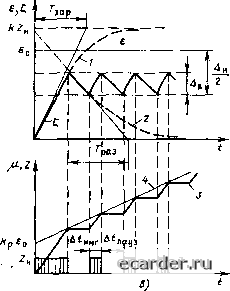 Рнс. 316. Структурные схемы (о и 6) импульсного ПИ-регулятора с ИМ постоянной скорости и переходные процессы в нем при е (I) = (в) 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 [28] 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |
||||||||||||||||||||||