
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 [29] 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 жим) релейного элемента усилителя, а следовательно, и ИМ будет повторяться. Характер перемещения \i = J (t) имеет вид ломаной линии S (рис, 3.1б,в), Эта ломаная линия может быть ириближенно заменена прямой 4, причем чем MCHbHie длительность одною включения Аимп релейного мтемеита и длительность паузы Д(яя)п, тем точнее совпадает действительный закон 3 изменения ц (t) с линеаризованной прямой 4. Сравнивая линеаризованный закон изменения \i{t) {рис. 3.16,в) с идеальным законом ПИ-рсгулирования (см. рнс. 3.5), видим, что релейно-импульсный регулятор с ИМ постоянной скорости со струк! урной схемой, приведенной иа рис. 3.16, а, приближенно реализует нропорционально-иитегральный закон регулирования. При этом очень важно отметить, что несмотря на наличие в ре( уля-торе со структурной схемой на рис. 3.16,а нескольких существенно нелинейных элементов (релейною усилителя, исполнительною механизма постоянной скорости) регулятор с достаточной практической точностью реализует линейный закон ПИ-pei улирования. Пропор1и1ональная составляющая закона ПИ-регулирования приближенно реализуется за счет начальною быстрого перемещения с постоянной скоростью РО при изменении е, а интегральная составляющая - за счет последующего автоколебательного режима работы релейного уси-ш-теля с отрицательной обратной связью и соответственно кратковременных перемещений ИМ. В современных импульсных регуляторах для обеспечения независимой настройки Аимп и Anjjrj цепь образной связи обеспечивает различные постоянные времени заряда Tsp и разряда Tpj, конденсаюра С. При включении ИМ переключатель Я с помощью специалыюго переключающего устройства автоматически переводится в положение 3, включается цепь заряда конденсатора. При этом передаючная функция цепи обратной связи имеет bhii (3,58) При отключении исполнительного механизма переключающим устройством переключатель П переводится в положение Р, включается цепь разряда коиденсагора. При этом передаточная фущсния цепи обратной связи примет вид Иос(Р) = к/(Гра,Р + 1). {3.59) Переходный пропесс в цепи обратной связи при включении ИМ {Z = Z,) з соответствии с (3.58) определяется дифферен- циальным уравнением Гзар№.р/0 + и = 2„, (3.60) а при отключении ИМ (2 = 0) - уравнением Граз(<*СраэМ) + Сраз = 0, (3,61) где Cidp и - выходные сигналы канала обра1ной связи в режимах Z = Z„ (ИМ включен, конленсагор С заряжается) и Z = О (ИМ отключен, конденсатор С разряжается). Решая дифференциальное уравнение (3.60) при нулевых начальных условиях jap(i=o) = 0, получаем аналитическое выражение идя экспоненты J (рис. 3.16,в); -,/т, (3.62) Из (3.61) для экспоненты 2 при начальных условиях !pa\(i=0) = kZn находим ip.. = l<Z,e~"\ (3.63) Определим параметры приближенного закона ПИ-регулирования релейно-нмпульс-иою регулятора с ИМ постоянной скорости. При изменении входно! о сигнала с со скоростью dB/Jt длительность импульса Диии определяется выражмшем Акмп = Д./[<*(е - !.)/dtl (3.64) Длительность паузы Atnay, = A„/[d(6-Cpa3)/rfa (3.65) Решая совместно (3.60) и (3.64). находим Димп = ъ/[{кЛ - Сзар)/Гзар - ds/df]. (3,66) Так как сигнал а на входе релейного усилителя изменяется в малых пределах Дн,/2]о Д„ч/2-Дв, то при е» Днч/2 в автоколебательном режиме усилителя можем принять, что с - - Смр = о О, т. е. ь ад Сзвр- С учетом этого выражение (3.66) запишем в виде AtM4i. = Kl{-dzjdt - t/Тщ, + Vc), (3.67) (3.68) - параметр настройки регулятора, называемый «скоростью связи». Решив совместно (3.61) и (3.65), найдем ДГг,зуз = АЦйфг + е/Тр,,). (3.69) Период повторения импульсов Скважность импульсов [см. (3,53)] (dE/dt + г/ТрЛ (3.70) В = (1/7"ра.- 1/Г,,р)е. (3.7!; С учетом (3.54) запишем dii S f dE dt + S v dt раз j £i/r . (3 72) При tpa, tjgp величина в 0 и выражение (3.72) запишется как =I<Je + zdt , (3.73) ~ /У.в ~ 7")jp/(fcz), - tpai- (3.74) Сравнивая (3.73) и (3.19), види.м. что ре-лейно-импульсный регуляюр с ИМ постоянной скорости со структурной схемой, приведенной па рис. 3.16,6, действительно приближенно реализует закон ПИ-регулирования с параме1рами настройки (3.74). При посгуплекии на вход регулятора по-сюянного сигнала к = е,, закон ПИ-pei улирования (3.73) запишется в виде ii = l<pEo(\ +t/T,). (3.75) Уравнение (3 75) определяет переходный процесс в линеаризованном ПИ-регулягоре при £ = ео (прямая 4 на рис. 3.16,в). Фактический переходный процесс определяется ломаной линией 3. При первом включении ИМ регулятора в начальный момент при С, v О скорость нарастания сигнала (рис. 3.16, в) на выходе обратной связи равна Если kZ„ » F., то сигнал обратной связи скомпенсирует выходной сигна-ч е = е„ за время Дг,=(н„-Д„„/2 + Д,)/(ад Дг,=(с,-Д„н/2 + Д,)/П,. (3.77) При » Дн.,/2 - Дв (3.77) приближенно можно записать в виде At = £olK»- (3.78) (3.76) В течение эюго времени релейный усилитель с oopaihoh связью работав) в неавтоколебательном режиме и ИМ перемещает регулирующий орган с постоянной ско-росгью. Регулятор работает в нелинейном режиме постоянной скорости. После того как входной сигнал будет скомпенсирован с точностью eg - = а = = Днч/2 -Дв, релейный усилитель отключит ИМ и сиглал на входе обратной связи исчезнет. Сигна.1 на выходе обратной связи начнет уменьшаться, и при - ~ ч = А„,,/2 релейный усилитель вновь включит ИМ и на вход обратной связи будет подан сигнал Z = Z„ В дальнейшем релейный усилитель с обратной связью будет работать в автоколебательном режиме, а сигнал а на входе ре-лейно! о элемента будет изменяться только в диапазоне Дч /2 I а Днч /2 - Дв. т. е. в пределах зоны возврата Др. С помощью импульсного регулирования можно также реализовать закон ПИД-регулирования. Структурная схема ПИД-регулятора нредст авлена на рис. 3.17, а. Отличие структурной схемы ПИД-регулятора на рис, 3.17, о от структурной схемы ПИ-регулятора на рнс. 3.16, а сосгоит в том, что на суммирующее устройство поступает не только отклонение s регулируемой величины от заданно! о значения, по и величина Ед с выхода реального дифференцирующего звена с передаточной функцией W-iip) - к ТлРЦТуР + 1), на вход которо! о подается отклонение е. Рассмотрим характер изменения выходной величины ПИД-регулятора при ступенчатом изменении входной величины - регулируемого пара.метра г = е. В соответствии с табл. 3.1 при поступлении постоянной величины на вход реального дифференцируюшего звена с передаточной функцией W,,ip) = k,T:,p/(T,p + i) сигнал на выходе звена будет изменяться тю экспоненте ел(1) = *:.аео<  ПИ-регулятор (pucj.-rSjS) , S Э 10 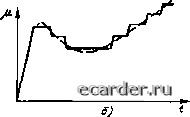 Рис. 3.17, Струк(урная схема (я) импульс-иою ПИД-регулятора и переходные процессы в нем (б) При к (() = Eq В начальный момент времени при Г = О значение % (0) = Ад, а при t-* ас значение €д(СО)-*0. Таким образом, результируюп[ий cm нал на входе релейною элемента регузяюра (см. рис. 3.16,« и 3.17,й) будс! определяться зависимое! ью При f = 0 результирующий си1нал будет равен Ео(1 + *:д), а при t-*x) он будет равен £д. При во( +jtj)> Д„ч/2 релейный элемент регулятора сработает, включится ИМ н на вход суммирующею устройства буде! гюсгу-naib сигнал обратной связи , возрастающий по экспоненте I, определяемой постоян- ной времени заряда Tjgp цепи обра i ной связи регулятора (рис. 3.17,6). На вход релейного элемента будет поступать сигнал ст = = (S + бд - В точке а, образованной пересечением экспоненты 1 с кривой 12, определяемой зависимостью Б + е, ~ Д„, /2 + Ди, сигнал ст на входе релеЙ1юго элсмеша будет равен ст = £ + Ед-; = Днч/2 - Дв. После этого релейный элемент отключится, ИМ остановится и сигнал обратной связи начнет уменьшаться по экспоненте 2, определяемой постоянной времени разряда Tf,s це1ш обратной связи регуляюра. Если параметры регуляюра Ад, Тд и Траз настроены таким образом, чго после точки а сигнал Б -t- Ед уменьшается быстрее, чем по экспоненте 2, то в точке б, обрачованной пересечением эксгюнеиты 2 с кривой 9, определяемой зависимостью е + Ед -Ь Днч/2, СИ1 -нал иа выходе релейного элемента булС! равен ст=е+Ед - = - Дцч/2. После этого релейный элемеггг сработает, но уже в нро-тивоположную сторону: включится в протн-вопооожную сюрону ИМ, и сигнал обратной связи начне i быстро уменьшаться по экспоненте 3. В точке «, образованной пересечением экспоненты 3 с кривой 10, определяемой зависимостью е + Ед-f-Д„ч/2 - Дц, сигнал на входе релейного элемента будет равен ст=-Днч/2+ Дв- После этого релейный элемент отключится, ИМ остановится и СИ1 нал обратной связи С, начнет умень-[па1ься по экспопептс 4 (сдвину1ый но значению и времени участок экспоненты 2). В точке г произойдет повторное включение ИМ в обратную сторопу. При Э10М сигнал обратной связи будет изменяться по экспоненте (сдвинутый по значению и времени участок экспонен1ы 3). В точке <) ИМ отключится. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 [29] 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |
||||||||||||||