
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [30] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 Число включений ИМ в обратную сторону определяется параметрами настройки peiy-лятора. Так как постоянная времени Тд выбирается меньше посюянной времени Тра,, то при некотором последующем отключении ИМ iioc-iie его включения в обратную сторону скорость уменьшения становится бачьше скорости уменыиения р>езультируго-щсго сигнала е + Кд. На рис. 3.17,6 этот режим наступает после точки д (после второго включения - отключения ИМ в обратном направлении). При эюм уменьшение си1нала обратной свяэи будет переходить по экспоненте 6. В точке е, образованной пересечением экспоненты б с кривой П, определяемой (ависимоСТЬю Е +Кг, -Днч/2. сигнал на входе релейного элемента будет равен = = Дн.1/2. После лого релейный элемент сработает в прямом направлении, включит в эюм направлении ИМ и сигнал обратной связи начнет возрас гать по экспонен ге 7 (сдвинутый по значению н времени учасюк экспоненты /) В точке ж релейный зле.мснт отключится; си1 нал обратной связи будет убывать но экспоненты И. В точке з релейный *;1емент снова включится в прямом направлении, и далее pei улятор будет рабо-1ать аналогично ПИ-регулятору (рис. 3.16,6). На рнс. 3 17,6 показан xapaKiep изменения сигнала Z(() на выходе релейною элемента и сигнала ц(() на выходе ПИД-регулятора со с1руктуриоЙ схемой, припедениой на рнс 3 !7,а. Сравнивая xapaKiep изменения выходного сигнала ii{t) ре1уляторов на рнс. 3.17 н 3.13 (кривая /), внднм, что регуляюр со структурной схемой на рис 3.17, с? действительно с некоторым приближением реализует закон ПИД-регулирования [штриховая кривая на графике ц(г) на рнс. 3.17,6]. 3.5. ПОЗИЦИОННЫЕ РЕГУЛЯТОРЫ Позиционные регулнюры работают по принципу «включено - выключено» Их реализация осуЕцесгвлястся. например, с помощью контактных и бесконтактных релейных элементов Позиционные ре1уляторы бывают двух-, трех- и MH01 0П0ЖЦИ01П1ЫМи. На рис. 3.18 приведены структурная схема й статические характеристики двухпо-зиционных per уля i оров. Двухпозинионные регуляторы настраиваются таким образом, чтобы значения ц и е отсчт ывалиь в приращениях от условного равновесного состояния обьекта регулирования, соответствующего расчетным значениям Цо и Сц, приня1ым за начало отсчета При этом статическая характеристика двухпозиционного регулятора без зоны неодножачиости примет вид, представленный на рИС. 3.18,6, а с зоной неоднозначное! и - на рис. 3.18,«. Применительно к .чвухпоэицнониым ре1уляторам границы зоны неоднозначное! и на статической характеристике (рис. 3.17,й1 принято обо(начитъ -он +а При jtom ширина зоны неоднозначное! и (зоны возврата) будет равна Д„ = 2а. Апали1ически статическая характеристика двухпозициоппого рв1 улятора без зоны неоднозначности запишется в виде ц = ц, при s>0: I ц = -Из прн 6 < О, J а с зоной нео.щозначпости - в виде ц = 1.(1 при ка; (Я = - при е -а; H = при -а<с<а и dF./dt<0; 1.1=-2 при -а<с<а и dii/dt>0. (3 79) (3.80) Из (3.79) и (3.80), а также из рис. 118, бив следует, что ,1вухпозиционшле реяу-ляюры постоянно оказывают на обьек! ре-!улирования воздействия, отличные oi их значений, необходимых для равновесного со-сюяния системы (при £ = 0). В результате этого автоматическая система с ;(вухпоэи-ционным регулятором будет работать в автоколебательном режиме в окрестностях ее равновесною состояния Статические характеристики ц = / (е) трсхгюзиционных регуляторов без зон неоднозначное! и и с зонами неоднозначности приведены на рис. 3,19,а и б. Аналитически статическая характеристика трехпозиционною регулятора без зон неоднозначности запишется в виде ц =0 при I fi I < Днч/2; H = Hi при fc Днч/2; Ц=-Цг !1ри £-Д„ч/2 (3.81) I де Дц., - зона нечувствительности регулятора, а с зонами иеоД1ЮЗначности - в виде ц=0 при £ < Днч/2-Дв, (1=0 при Дн.,/2 - Д„ < е < Днч/2 и d£/dt > О, ц = 0 при Дп - Днч/2 > е > -Д,ч/2 и da/dt < 0; ц = (1, при еЭ= Днч/2; (3.82)
Рис. 3.18. Структурная схема (а) и статические Характеристики без зоны неодиоэиачности (6) и с зоной неоднозначности (в) двухнозициониого регулятора: - двухпозвдиоывый регулятор
Рис. 3.19. Статические характеристики тркхпознцнонных регуляторов без зон неоднозначности (я) и с зонами неоднозначности (б) pep, при Д„,/2-Дн<е<Днч/2 и de/dl < 0; р= - Р2 "ри -Д1.4/2; fi=-2 "ри Дц - Д,ч/2 > е >-Л,,ч/2 и (ic/dr > 0. Из (3.81) и (3.82), а также из рнс. 3 19, а а б следует, что трехпозиционные регупя-торы имеют устойчивое состояние (ц = 0) в окрестносгях равновесного состояния системы (е = 0), определяемых зоной нечув-сгвнтельиости и зоной неодноЗ1ачнос1И статической характеристики. В этом состоит принципиальное отличие трехпознциоиных регуляторов от двухпоиционных. Если прн очередном переключении регулятора в состояние ц = 0 о1клопение регулируемой величины Е не будет выходить за зону нечувствительности регулятора, т. е. будет сохраняться условие £<Д,ч/2, то в этом состоянии автоматическая система регулирования может остаться бесконечно дажо. В системе не будет никаких авюколеба-тельиых процессов. На рис. 3.20 дан пример струк1урной схемы миогопозиционного регулятора и его статических характеристик без зон иеодно-значностн и с зонами иеоднозначностн. Из структурной схемы на рис. 3.20, а МН0Г01ЮЗИЦИ0НИ0Г0 регулятора следует, что его можно представи1ь как necKOJjbKo двух-позиционных регуляторов с различными уставками их срабатывания, соединенными последоват ельно. Отклонение регулируемой величины от заданного значения с поступает на входы всех двухпознционных рсгуляОров. Основной двухнозиционный регулятор ДРд срабатывает прн изменении знака е. Например, при е > О регулятор ДРо срабатывает и па его выходе 1юявляется регулирующий сигнал Цо. Если этого регулирующего воздействия оказывается недостаточно и отклонение продолжает возрастать, то при е - - AQi >0 срабатывает регулятор ДРц; и на выходе мно[ онозицнонно! о регулятора появляется дополниельное регулирующее воздействие Р1Б. Результирующее воздействие на выходе будет равно ц = Ро + Mib- В общем случае таких дополнительных регуляторов можез быть несколько и при возрастании Е результирующее реулирующее воздей-
Рис. 3.20 Пример структурной схемы [а) н статических характеристик без зон неоднозначности (б) и с зонами неоднозначности (е) mhoi опозиционного регулятора ствие может быть равно где п - число двухпозицнонных регуляторов Л?,ь, включившихся При возрастании е. Если При очередном включении i-ro двухпозиционного регулятора отклонение е начнет уменьшаться, то ре1уляторы поочередно в обратной последовательности начнут отключаться. Аналогично работает многопозиционный регу.чятор при отклонении £ в обратную сторону, т. е. при е < 0. Резульгиругощее воздействие многопозиционного ретулятора при *том будет равно -И= -цо - Z MjM. где m - число двухпозициоиных регуляторов ДРм, включившихся при уменьшении е Б сторону Е < О, Статическая характеристика многопозиционного регулятора без зон неоднознач ности составляющих двухпознционных регуляторов представлена на рис. 3.20, б, а при наличии зоп неоднозначности - на рис. 3.20, е. 3.6. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ПРЯМОГО ДЕЙСТВИЯ Как указывалось в § 3.1, в регуляторах прямого действия воздействие регулируемой встичины на ттервичкый измерительный преобразователь регулятора служит источником энер! ИИ как для формирования закона регулирования, так н Л.ЛЯ перемещения регулирующего органа К зтнм регуляторам энер- гия извне не подводится, Автоматические регуляторы получили широкое распространение в системах стабилизации давления, расхода, уровня, температуры и т, д, В качестве примера ш рис. 3.21 представлен автоматический регулятор давления прямого дейе!вия, поддерживающий заданное значение давления среды в трубопроводе после регулирующего клапана, т. е. «после себя». Регулятор вьпюлнен в виде клапана с мембранным приводом. На мембрану I воздействуют давление измеряемой среды и противодействующая пружина 2. При задатюм значении давления условие равновесия сил, воздействукяцих на мембраиу, запишется в виде pfcl, (3.83) где р ~ заданное значение давления в трубопроводе; - эффективная нлошадь мембраны J; с - жесткость пружины 2; i - перемещение клапана жестко соединенно! о штоком 4 с мембраной / 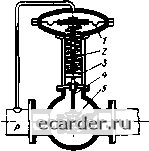 Рис. 3.21. Автоматический регулятор давления прямого действия 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [30] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||