
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 [33] 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 Имеется внутренний i оковый задатчик 0-100%, а также возможность подключения внешнего задатчика РЗД-12 с диапазоном ±5%. Установка режима работы блока определяется положением перемычек на внутренней панели прибора. Блок вычислительных операций БВО-2 предназначен для выполнения математических операций умножения и деления и имеет возможность суммирования аналоговых сигналов, возведения их в квадрат и извлечения квадратного корня. Входные СИ! налы изменяются от О до 5 или от о до 20 мА, выходной - оз О до S мА или от о до 10 В. Блок нелинных преобразований БНП-2 предназначен для демпфирования и Езелиней-ного преобразования входного аналоговот о си1 нала. Блок имеет возможность возводить в степень и извлекать квадратные корни, Входной сигнал изменяется от О до 5 или От о до 20 мА, выходной - от О до 5 мА или от О до 10 В. Блок селектирсдаания БСЛ-2 предназначен для выделения наибольшего или наименьше! о СИ! нала из нескольких входных и передачи его на выхот с одновременной сигнализацией номера выделяемою сишала. Токовых входов четыре. Выходной ана-ло!Овый сигнал один. Для сшнализации номера выделяемого сигнала БСЛ-2 имеет четыре логических выхода в виде переключающих контактов реле. Для получения активног о логического сигнала О или 24 В к этим выходам необходимо подключить блок преобразователя напряжения БПН-25, который имеет два гальванически не связанных источника напряжегшя постоянного тока. Регулирующие блоки. В группу регулирующих устройств сис!емы АКЭСР-2 входят блоки РП4-У, РП4-П и РП4-Т. Блок (регулирующий !1рибор) РП4 осуществляет сравнение ею нала задания с сигналом значения параметра, выделяет сигнал рассогласования и формирует совместно с электрическим исполнительным механиь мом постоянной скорости закон ПИ-регулирования. Блок РП4-У !1редназначен для работы с токовыми датчиками. Блок имеет четыре входа от О до 5 И1!и 01 О до 24 мА и два входа от О до 10 В. Токовые входы гальванически разделены друг от друга и от выхода. Блок РП4-Т предназначен для рзботы с двумя термопреобразователями сопротивления и одним преобразователем термоэлек- трическим. Входной сигнал изменяется от О до 50 мВ. Датчик подключае1ся к коробке холодных спаев КХС4, Блок РП4-П предназначен для работы с дифференпиально-траисформаторными, индуктивными, реостатными и ферродинамнче-скнми датчиками. Блоки оперативного управления. В группу устройсгв оперативного управления входяi блоки БРУ, БЗИ и РЗД. Блок ручного управления (БРУ) предназначен .,тля выбора вида управления исполнительным механизмом (автоматическое или ручное), осуществления визуального конт-poJ!я за положением выходного вш!а элек-трическо! о ИМ, осуществления световой индикации пoJ!Oжeния элементов цепей управления. Блок интегрнрую1!1е1 о 1адат чика (БЗИ) предназначен для интегрирования им!1ульс-ных сигналов, преобразования значения ин-те1рала в эквивалентное значение аналогового си1на-1!а и за!1оминания значения интеграла при о1сугС!Вии ВХОДНЫХ сигналов или снятии питающего напряжения Блок предназначен для формирования совместно с релейным регулирующим прибором РП4 корректирующего воздействия. Блок «ручной задатчик» (РЗД) предназначен для ручного ввода унифицированно! о СИ! Haj!a от О до 5 мА в функциональные блоки Блок выполняет также функции преобра ювани я основных видов унифицированных сигналов и усиления по мощности унифицированного сигнала. До!10лнительно блок служит для индикации срабатывания релейного блока по фазам «меньше» и «больше». Принципы построения автоматических свезем с применением блоков АКЭСР-2. В АСР, реализуемых с исцользоваиием блоков системы АКЭСР-2, си1нал от датчика поступает на вход регулирующего прибора. Сигнал задания формируется задагчиком РЗД и тоже поступает иа вход РП4, где вместе с сигналом обратной связи ИМ формируется сигнал рассогласования. Управление обьек-том от РП4 может осуществляться как автомат ически, так и дистанционно. Переключение эт о осуществляется ключом выбора режимов блока управления БРУ-42. В автоматическом режиме сигнал рассогласования обрабатывается в РП4 в соответствии с законом регулирования и через ключ блока ручного управления БРУ-42, установленный в положение «А» (автоматическое), поступает на усилитель ПБР-2М, который управляет исполнительным механизмом МЭО. В режиме ручно! о управления сигнал формируется путем нажатия кнопок 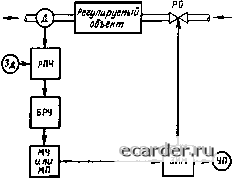 Рис. 4.2. Структурная схема АСР с ПИ-регу- лятором на блоках АКЭСР-2: 3d - чалатчик, Д - датчик; РО - регулирующий орган; УЛ - указатель положения; ЭИЛ/- электрический исполнительный механизм; МУ - магнитный усилитель, МЯ - магннгный пускатель Регулируемой @» РПЧ а ли Рис. 4.5. Структурная схема АСР с ПД-регулятором иа блоках АКЭСР-2 объект или МП Рис. 4.3. Структурная схема АСР с ПИД-регулятором на блоках АКЭСР-2 Регулируемый объект гжоос (Q)* РПЧ MODC или МП Регулируемый объект гжоос т или мл Рис. 4.6. Структурная схема АСР с И-регу-лятором на блоках ЛКЭСР-2 Рис. 4,4. Структурная схема ЛСР с П-регулятором на блоках ЛКЭСР-2: ГЖООС - глаьная жесткая отрицательная обратная связь; МООС - местная отрицательная обратная связь «Б» (больше) и «М» (меньше), встроенных в БРУ-42. Сигнал от датчика положения ИМ поступает на индикатор, встроенный в БРУ-42. Автоматические системы с таконом ПИ-регулирования реализуются с применением только регулирующего прибора РП4 (рис. 4.2). Автоматические системы с законом ПИД-pei улирования реализуются на базе ПИ-регулятора, на вход которого дополнительно поступает сигнал о[ блока БДС, ра-бо I аюшего в режиме дифференцирующего звеиа (рис. 4 3). При введении в АСР жесткой обратной связи по положению выходного вала ИМ регулирующий прибор РП4 обеспечивает формирование закона U-pei улирования (рис. 4.4). Регулятор с законом ПД-регулирования реализуется на базе И-регулятора, на вход которого допо пни I ельно поступает сигна ч через блок БДС, работающий в режиме дифференцируют пег о звена (рис 4.5). Интегрэ-тьный закон регулирования реализуется теми же блоками, что и в ПИ-регу-тяторе, но входной сигнал в этом случае поступает через блок динамической связи БДС, работающий в режиме демпфера (рис. 4.6) РсгуляIоры РП4 можно использовать в АСР каскадно-связанного регулирования в качестве ведущег о (корректирующего) ре-гутятора. В этом случае выход регулятора подключается к импульсному интегратору БЗИ (вместо МУ или МП}. Блоки системы АКЭСР-2 позволяю! ьы-полнять АСР с безударным переключением сисгемы с режима ручного управления на автоматический. Для 31 ой цели при !1ерек1тючс-нии на заданное значение парамегра используется 6j)ok БДС, на который при ручном управлении подается сш нал с регуля i ора РП4. В автоматическом режиме этот сигнал отключается При необходимое! и переключения на текущее значение параме тра используется б.чок БЗИ, который работ ает в режиме управляющего задатчика. Ручное управление БЗИ осуществляется от своего БРУ. Комплекс технических средств «Каскад-2)) Комплекс технических средств «Кас-кад2» состоит из функциональных и регулирующих блоков, позволяю1ци\ агрегировать автоматические сисгемы регулирования для автоматизации различных тexнoJЮгичecкиx процессов. Комплекс состоит из отдельньтх блоков, выполняющих различные функции. Блок регулирующий аналоговый с непрерывным выходным сигналом Р17 выполняет алгебраическое суммирование с гальваническим разделением и мас1П!абированием до четырех входных унифицированных сигналов постоянного тока, введение сщ нала задания от внутреннего корректора либо от внешнего по тентщометрическо! о задающего устройства, формирование сигнала отклонения, формирование по выбору одного из законов П-ПД-ПИ- или ПИД-регулирования, двустороннее регулируемое ограничение выходного СИ1 нала, демпфирование сигнала отклонения, в комплекте с внешним блоком управления (например, БУ12) - безударное переключение режимов рабо i ы и ручное управление BbTXOj(HbiM сигналом. Блок регулирующий аналоговый с непрерывным выходным сигналом Р17.1 вьтттол-ияет суммирование и масштабирование до трех снгнатов .щфферепциаоьно-трансфор-маторных преобразователей, а также унифи-цированньтх сит налов постоянного тока, введение сигнала задания, формирование сигнала отклонения. Остальные функции - как у блока Р17. Блок регулирующий аналоговый с непрерывным выходным сигналом Р17.2 выполняет суммирование и масштабирование до двух СИ! налов термопреобразовате.1ей со-ттротивления, а также унифит(ированных сит -налов постоянного тока, введение cnrnaJTa задания, формироваШС сигнала отклонения. Остальные функции - как у б.чока Р17. Блок регулирующий аналошвый с не-нрерьюиым сигналом Р17.3 производит суммирование н мас1итабирование сигнала пре-образова i еля термоэлек грического и унифицированных сигна.чов постоянного тока, введение сигнала задания от внутреннего корректора либо от внешнего потенциомет-рнческого задающего устройства, формирование сигнала отклтонения. Остальные функции - как у блока Р17. Блок регулирующий аналоговый с импульсным выходным сигналом Р27 выполняет алгебраическое суммирование с гальваническим разделением и масштабированием до четырех входных унифицированных сит налов постоянного тока; ввод си1нала задания от внутреннего корректора либо от внешнего лотентшометрическо! о задающего устройства; формирование по выбору одного из законов П-, ПИ- или ПИД-регулирования и двух- или трехлозициоииого регулирования: демпфироватше и индикацию выходного сигнала; введение зацрета на управление нагрузкой. Блок регулирующий аналоговый с импульсным выходным СИ1 налом Р27.1 осуще- 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 [33] 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |