
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 [39] 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 Пример получения необходимой характе-рнстики БНП Ху= /(Гн) ДЛЯ канала коррекции приведен на рис. 4.14. На рис. 4.14 в квадранте / строится требуемая зависимость В квадранте характеристика канала коррекции pei улятора Необходимо, чтобы минимум и максимум требуемо! о значения Vce входили в диапазон характеристики VcB = f(Xi-). Путем графического построения иа примере точки 1 получаем точку 1 требуемой характеристики БНП, Зависимость Ху = f (и а) получается в квадранте IV. Аналогично находится характеристика Хт = /([/„) БНП для канала коррекции Т,, Для этого в квадранте / строится зависимость (Thj/Гнз мик) = /(Гн)> а в квадранте -зависимость (Т„з/Ги5 руч, = /(Хг). Полученные зависимости БНП Ху - = f(tn) И т= f(н) аппроксимируются шестью линейными участками н реализуются на блоках нелинейных преобразований. Схема ЛСР с автоподстройкой приведена на рис. 4 15. На схеме не показано питание блоков. Задание ре1улятору подается oi задатчика РЗД в диапазоне 0-10 В. Chi калы Переменная и Задание поступают на входы 12 и Х21 относительно обшей операцион-
Рис. 4.14. Пример построения требуемой характеристики Ху = f {U) блока БНП ной шины. Сигнал Нагрузка подается параллельно на два БНП, с которых снимаются корректирующие сигналы Ху v\ Хт, поступающие на регулятор. В регуляторе использован .Ю1ический выход замыкания тири-сторных ключей. Через блок ручного управления БРУ-У он управляет пусковой аппаратурой исполнительного механизма. Пусковая аппаратура имеет встроенный источник питания, один из полюсов которого соединен со средним проводом Qp. Блок ручного управления БРУ-2К (рис. 4.1) позволяет управлять исполнительным механизмом oi кнопок SB и SBy илн включать режим управления от регулятора. Блок ручного управления БРУ-У имеет „нагрузна 0-10Ь Переменная 0-т 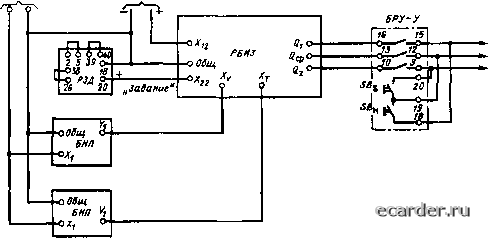 Рис. 4.15. Схема АСР с автоматической подстройкой параметров Ксв и 7з блока РБИЗ 120 кроме кнопок SBb и SBm кнопку SB\ для перевода АСР в автоматический режим. При нажатии кнопки .Вд (на схеме рис. 4.15 не показана) сраба1ывает реле блока, замыкаются контакты и управление про-исхо;1ит автоматически. При нажатии кнопки SBr или S8\t контакты реле блока БРУ-У переключаются и выходной сигнал с регулятора отключается. С этого момента управление осуществляется кнопками SB и 5Вм-Для перехода на автоматический режим достаточно нажать кнопку SB\. Перед включением регулятора в автоматический режим необходимо установить ручку по шкале «Скорость связи» V регулятора иа значение Kqb ручн- "Р" котором снималась характеристика по каналу V = = f{Xy). Для установки Тиз ручн необходимо измерить сигиа.[ нагрузки из i рафика Г„з = = f(Jiii И определить необходимое значение Ти1, за1ем ИЗ графика [радуировки peiy-лятора (7"„j/7h3 ручн)=/(г) определить (Т"из/Т„т ручн) = Й и подсчитать Т„, рн = Полученное значение выставить на шкале 7"и1 регулятора. 4.3. РЕГУЛИРУЮЩИЕ БЛОКИ АНАЛОГОВЫЕ (РБА) Блоки (регуляторы) РБА входят в систему АКЭСР и реализуют закон ПИД-peiy-лирования с демпфированием пропорциональной и дифференциальной составляющих Ав«л(р)-кп[1/(фР+ 1)+ 1/(и.Р) + + (ТфЛ-Ы)]Хвх{р), (4.15) где ЛГвых(р) - изменение сигнала на выходе; n\ip) - рассогласование между «Переменной» н «Заданием» на входе ретулятора; - коэффипиен! передачи; Гф - постоянная времени демпфирования (фильтрации); Г„т - постоянная времени изодрома; T„g - постоянная времени предварения. При Глф = О регулятор реализует идеальный закон ИИД-регулирования (без демпфирования). Принципиальная электрическая схема pel улятора прелс1авлеиа на рис. 4.16. В регуляторе предусмотрено переключение зажимов на колодке Х2 (на рис. 4.16 не показана), которое позволяет в закон регулирования вводить Д-составляющую выхода либо по скорости изменения сигнала рассогласования (в этом случае Д-составляюшая будет и при изменении задания), либо только по скорости изменения «Переменной». Регулятор имеет три входа по каналу «Переменная» и четыре входа по каналу ((Задание», причем один вход iro заданию - масш габ иру емый. Ло входам «Переменная» предусмотрено ;(ва входа по напряжению О -10 В и один вход в виде aнaJЮГOвoгo токового сиг-hajia с возможнос1ью установки любого из .динпазонов- 0-5, О- 10, 4-20 мА. По входам «Задание» предусмотрено три входа по напряжению 0-10 В и один вход токовый с переключением диапазонов. Регулятор имее! два выхода- один токовый с переключением диапазонов и один по напряжепию 0-10 В, Вход н выход регулятора гальванически развязаны. Регулятор имеет регулируемые ограничения минимума и максимума сигнала выхода. Для ввода ограничения иа потенциометры уставки 01 раничений регулятора необходимо подать опорные напряжения -10 В. В pei уляторе предусмотрены переключатель SAy фазировки «прямой -обратный» и диС1анцнопная инверсия сит нала выхода при *амыкании внешних контактов 14 и 18. Схемой pei улятора предусмотрены пере-ключеште режимов рабо1Ы «Р» -«А» и ди-сташдаонное управление выходом регулятора в ручном режиме. Переключение режима осуществляется путем размыкания (режим «А») или замыкания (ре-жим «Р») виешнето зажима Р/А с обшей операционной шнны. Ручное управление производи1ся от двух кнопок с обшей точкой, подключенных к входам Рб и Рм регулятора. При перехоле с автоматическою режима на ручной выходной сит нал остается таким, катгнм он был в автоматическом режиме. При переходе с ручнот о режима на автоматический в случае нулевого сигнала рассогласования значение сигнала на выходе не изменяется, чем обеспечивается бестолчковое включение регулятора. При наличии сигнала рассогласования в момент включения автоматического режима пропорциональная от-работ ка выходного сигна.та отсут ствует и ситнал на выходе будет изменяться постепенно за счет интегральной составляющей. В ретуляторе предусмотрены гнезда для контроля сигнала по ходу формирования составляющих выхода: У, - контроль Ич:о-ставляющей; Уд ~ контроль ПД-составляю-щей; Уз - контроль ПИД-выхода до ограничителя; У - контроль выхода после ограничителя. Измерения в гнездах осуществляются отпосительно гнезда У©. Органы настройки pei улятора: ручка уставки: коэффициента усиления „к„"; PBA-iil ,Р£А-П \05ш,и.й. Подпор при вход- U-iri мм сигнале ц-20 мА Масштабирование входа по заданию 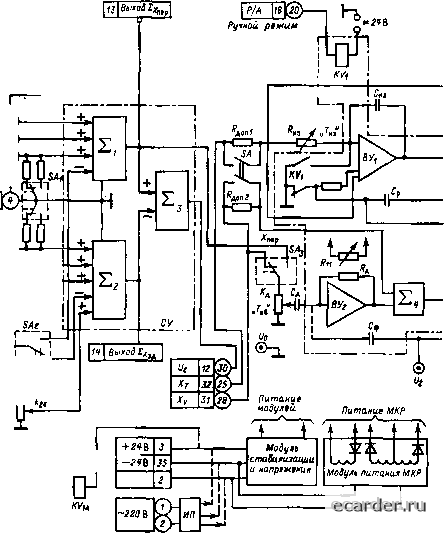 I sbb »@)-f}- Рис. 4.16. Принципиальная электрическая схема регулятора РБА постоянной времени изодрома ,.Т„э"; постоянной времени предварения „Тцв"; постоянной времени демпфирования -.Тдф"; ограничения «Огр. мин» и «Огр. макс>>; коэффициента масштабироваттня задания перемычки для. установки диапазона iоковых входных сигналов на колодке с перемычками А7; установки диапазона токовою выходного сигнала на колодке Х2; переключения входа днфференциа юра «Переменная» или «Рассогласование» на колодке Х2; установки фазнровки «прямой - обратный» на колодке Х2. Предусмотрена также дистанционная инверсия выходного си нала. Pel уляторы РБА выпускаются приборного типа {с индексом П) или шкафного (с индексом III). Регуляторы РБА-П подключаются на напряжение 220 В. Они расположены в корпусе, и для дос1уГа к органам настройки и переключателям необходимо выдвинуть 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 [39] 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |