
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 [40] 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 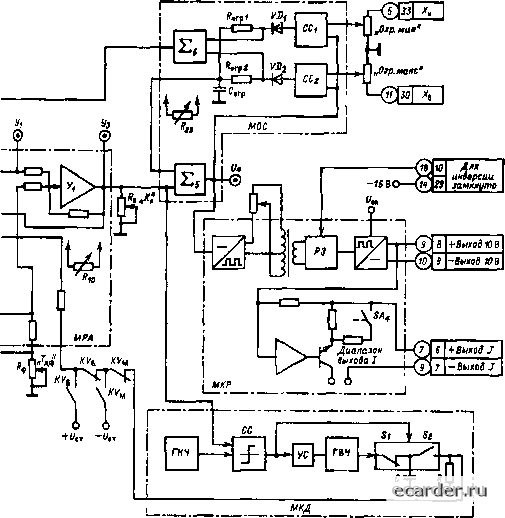 регулятор из корпуса. Он присоединяется к зажимной колодке корпуса через штепсельный разъем ШР и может полностью отсоединяться и провеяться вне корпуса. Регуляторы РБА-Ш смонтированы в виде блоков, вставляемых в шкаф через штепсельный ра1ьем. Они подключаются к блоку групповою питания БПГ с напряжением + 24 Оажим 3) и -24 В (зажим 35) относительно общей точки питания (зажим 2). Кроме того, от БПГ на регулятор подаются стабилизированные опорные напряжения + 10 и -?0 В также относительно общей точки питания. При проверке регулягора следует иметь в виду, что номера маркировки зажимов РБА-П и РБА-Ш на разъемах не совпадают. Также ПС совпадают для РБА-П номера внешних зажимов на корпусе с номерами на штепсельном разъеме внутри корпуса. Входные сигналы «Переменная» и «Задание» подаются на зажимы регулятора (рис. 4.16) относительно обшей шины 36 («минус» на общей шине). На токовых входах 21 и 25 имеется набор резисторов, что позволяет, устанавливая определенные перемычки на плате X/ (на рис. 4.16 не показана), преобразовать токовые сигналы различных диапазонов в эквивалентный сигнат по напряжению. При диапазоне 4-20 мА на зажим 34 необходи.мо подать -10 В отно- сительно зажима 36 для подавления начального уровня 4 мА. Сигналы «Переменная» суммируются на сумматоре сигналы «Задание» - на сумматоре Y,2- На зажимал 13 и 14 предуемш-рен контроль выходных напряжений сумматоров На сумматоре вырабатывается сигнал рассогласования между «Заданием» и «Переменной», который выводится на зажим 12. Далее сигнал рассогласования поступает на модуль МРА, реализующий закон ПИД-регулирования. Д1я подачи сигнала рассогласования на модуль МРА необходимо соединить зажимы 12, 31 н 32, так как внутриблочные соединения узла суммирования и модуля МРА отсутсгвуют. Интегральная составляющая выходного сигнала реализуется на высокоомном усилителе SYj вследствие его охвата положительной обраIной связью через конденсатор Сиз и включенный на входе резистор Д„з. Время июдрома прн 310М Tni = Ru-iCui и изменяется путем стутгенчатого т1ереключевия Дифференинальная составляющая реализуется на высокоомном усилителе ВУ, иа входе которою устаповтген конденсатор Сд. Усилитель охвачен отрицательной обратной свя(ью через резистор Rj. Постоянная времени предварения Т„ц = RaCr, и сгепень ее ввода устанавливается ручкой по1енцио-мегра „Тпв"- В качесве сигнала, по которому берется нроизводная, подключается либо сигнал рассот ласовання между «Переменной» н «Заданием», либо «Переменная» (в зависимости от положения перемычек на колодке Х2). На сумматоре суммируются дифференциальная составляющая и сигнал рассогласования. Их сумма в свою очередь суммируется с интегральной составляющей на усилителе У1, охваченном жесткой обратной связью. Таким образом, на выходе У, реализуется суммарный сигнал из пропорциональной, интегральной и дифференциальной составляюших. ЗначЁнне суммарного сшнала зависит от Сопротивления резнсюра R,„ опи-фрованного в единицах коэффициента усиления регулятора к„ = 0,3 15. Переключатель SA позволяет изменить диапазон уставки к„. Если переключатель установить в положение, при Котором резисторы Лвдм и Л-г окажутся зашунтированными, то с помощью R„ можно установить к„ в днапашне 1-50. Демпфирование ттропорцнональной и дифференциальной составляющих выходного сигнала peryjTHTopa осуществляется путем охвата гибкой обратной связью ВУ2 н 4 через Сф и Нф Время демпфирования = О 20 с устанавливается резистором Яф. При = О значение Т,ф = 0; при Кф = = Лф макс значение Тлф = 20 с, Выходной сигнал усилителя У,, реализующий закон ПИД-ре) улирования, посту-naei иа ограннчи1ель выходкою сигнала по максимуму и минимуму. Ограничитель реализован на сумма tope и двух схемах сравнения, нагруженных на КС-цепочки через диоды VD, и VDj. Уставки ограничения устанавливаются потенциометрами, на когорые подае1Ся опорное напряжение - Ю В относительно общей шины 36. Напряжение, пропорциональное уровню ограничения, подастся на схемы сравнения СС, и CCj, где сравнивается с текущим значением выходнот о сигнала сумматора j. Если выходной си1нал меньше уставки «Огр. макс» и больтие «Огр мин», то ни одна нз схем сравнения не срабатывает и сигнал по напряжению на конденсаторе Cjp равен 0. В этом случае выходной сит нал £j повторяет выходной сшнал У с коэффициентом передачи 0,5. Если выходной сигнал 3 выйдет за уровень ограничения, например станет больше уставки «Oip макс», то сработает ССг и на ее выходе появится сигнал отрицательной полярности, постоянный По ам1шитуде, и конденсатор Сщ-р начнет заряжаты;я через диод VDj и резистор Логр2- На Y,s иачне! поступать дополнительный сигнал, коюрый привелег к уменьшению выхошюго сигнала 5 до значения уставки отраничення по максимуму Таким образом, при превышении максимума сит нала ССд будет периодически срабатывагь и поддерживать выходной сигнал 5 очень близким к уставке ограничения. При выходном сигнале ниже мини-мaJьнoй уставки срабатывает СС, н Со.р начнет заряжаться наттряжепием друюй полярности В результате сигнал на выходе начнет возрастать и, достигнув ограничения по минимуму, будет поддерживаться бли1-кнм к значению минимума. При срабатывании любой из схем Сравнения через сумматор 6 на вход В У, интегратора поступает сигнал, предохраняющий низ ei ратор от перенасыщения. В результате этого не происходи г временного запаздывания действия регулягора при изменении знака сигнала рассогласования. Сигнал nocJte ограничителя поступает на модуль кондукгивного разделения. Кондук-тивное разделение дос1игается за счет широтной модуляции входного аналогового сигнала, передачи его через трансформатор и последующей демодуляции, Питание узла демодуляции гальванически не свяшно с пи- танием предыдущей части схемы. В этом модуле [гредусмотрсно дистанционное инвертирование выходного сигнала при чамыкании зажимов 10 и 29. В последнем случае на вход релейного элемента подается дополни-телы1ый ситнал смещения - L5 В и выходной синал инвертируется. На выходе регулятора предусмотрена выдача аналогового О- 10 В (зажимы 8 и 9), а также токового (зажимы б и 7) сигналов. Диапазон выходного тока устанавливает ся перемычками на колодке Х2, с помощью которых изменяется сопротивление в цепи эмиттера преобразователя напряжения в ток. В регуляторе предусмотрено дистанционное переключение режимов работы «Р» и «А» (зажимы 18 и 56). В автоматическом режиме перемычка между 18 И 36 отсутствует, реле KV, обесточено и его контакты находятся в положениях, указанных на схеме. При ручном режиме (замыкаются зажимы 18 и 36) срабатывает КУ,, замыкается на землю вход ВУу интегратора, на который в автоматическом режиме поступал сигнал рассогласования через Ri, конденсатор Ср отключается от земли и оказывается подключенным к другому входу вУ). Ручное управление осуществляется путем замыкания кнопок, ]шдключенных к зажимам 19 SBs («Больше»), 20 SBm («Меньше») относительно обнюй шины 36. £сли, например, нажать кнопку «SB>, 10 сработает реле К Kg и через его контакт на вход ВУ и на конденсатор Ср будет подано напряжение от стабилизированного источника -I- Uoi,. За счет охвата ВУ, и У, положительной обратной связью с конденсатором Ср сигнал с выхода У,, а следовательно, и с выхода регулятора ца»шет возрастать. При отпускании кнопок SBp. конденсатор Ср oKajbiBaercfl заряженным до определенного уровня и на выходе поддерживается сигнал, неизменный по времени и равный значению в момен [ отпускания кнопки. При нажатии кнопки SBm на вход ВУ, поступает сигнал противоположной полярности и выходной сигнал будет уменьшаться с постоянной скоростью. Дня поддержания постоянства во времени выхошюго сигнала ре17лятора при ручном управлении, коша отпущены кнопки ХВб и SBm, в регуляторе предусмотрен специальный модуль компенсации дрейфа МКД. Выходной сигнал интегратора после поступает на вход схемы сравнения - модуль МКР, где сравнивается с колебаниями пи.1ообразиой формы генератора низкой частоты ГНЧ. На выходе схемы сравнения СС формируются прямоугольные импульсы положительной и отрицательной полярностей, отношение длительностей которых пропорционально выходному сигналу интетраюра. Схема сравнения управляет ключами и через устройство синхронизации УС - работой генератора высокой частоты ГВЧ. При отрицательной полярности выходного сигнала СС ключ S, замкнут, 2 разомкнут - происходит заряд конденсатора С от импульсов ГВЧ. При положительной полярности выходного сигнала СС заряженный конденсатор С переключав 1ся иа разрядный резистор R и BXOJI HHTcipaTOpa. Полярность корректирую-П1ИХ импульсов противоположна направлению изменения выходного сигнала интегратора, что приводит к изменению выходного сигнала в противоположную сторону. Вследствие этою выходной сигнал интегратора все время колеблется около постоянно!о уровня - ючки устойчивого равновесия. Число таких точек определяется отношением частот ГИЧ и ГВЧ. В момент нажагия кнопки SBm или SB выход модуля МКД ожлючается от интегратора. При О) пускании кнопок выходной сигнал HHTeipaTopa стабилизируется около ближайшей устойчивой точки. В автоматическом режиме выход МКД заземляется через размыкающий контакт реле KKj. Питание схемы осуществляется напряжением + 24 и - 24 В от носительно общей точки (зажим 36). Пи (ание отдельных модулей стабилизируется модулем стабилизации напряжений. Питание части схемы после модуля кондуктивиого разделения МКР осуществляется специальным модулем питания, гальванически разделенным от цепей питания остальных модулей. Разделение пеней питания происходит за счет модул Ящи, трансформирования и последующей демодуляции. Доя ступенчато!о изменения диапазона уставки коэффи[шента передачи Лц в схеме предусмо1рен переключатель SA, с помоп[ью которого включаются или шуншруются дополнительные входные резисторы перед интегратором (Кдйп!) и сумматором Ляопй При включении резисторов й,,„„ и Ronl изменяется коэффициент передачи П- и Я-со-ставляющих выходного си1нала регулятора, но время удвоения (постоянная времени изодрома) при этом остается прежним. Коэффи-ниент передачи Д-составляющей не зависит от положения переключателя SA, а тю означает, что при изменении диапазона уставки коэффициента передачи изменяется диапазон уставки постоянной времени предварения Тпо, 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 [40] 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |