
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 [43] 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 лирующий клапан. Поэтому РЗД (II) подключен на выход 0 - 5 мА и при работе используется 1 оковый выход pei улятора в том же диапазоне Контакты БРУ-2К переключаются при нажаши кнопок вида режима управления. Контакты не только переключают на ЭПИ токовый сигнал, но и одновременно шунтируют огключегшый ситнал. Шунтирование отключаемо! о токового выхода обязательно нужно предусмотреть, так как, во-!1ервых, разрыв цепи приводит к перенапряжен иям в схеме ис т очника, во-вт орых, перед вкпючением к ЭЯЯ си! нала от РБА необходимо протсонтролирова гь выход1Юй cnrnaJT с РБА Указатель положения БРУ-У, настроенный на / = О + 5 мА. используе1СЯ дня контроля сит нала на входе ЭПП, а также может быть переютючен для kohtpojth выходного сигнала регулятора перед переходом управления с задатчика РЗД (II) на регулятор. Для эго! о в схеме предусмотрены тумбчер Sv4j и стабилитроны, включенные встречно токовым си! налтам. Если имеегся уверенность, что выходной сигнал РЗД (II) всегда соотве т с! вует значению (в процентах), установленному по шкaJтe, ю выходной cHTHaJT БРУ-2К можно не KOHTpojтировать, а указатель подключить только для контроля выходнот о сигнала регулятора. Дгтя контроля сигнала paccoi .тасования установлен нольтл(етр с нулем в середине шкалы. Рассмотрим оттерации перевода АСР в различные рсжимьт работы. Ручное управление с РЗД (II). Нажать кнопку S-fip блока БРУ-2К. К элек т ропневма-гическому преобразователю ЭПП етодклю-чить выход задатчика Указатель БРУ-У измеряет входной сигнал ЭПП Пеход на ручное управление через регулятор. Ука!атель положения тумблером SAj переключить на измеретше выходнот о сигтш-ла регулятора. С ттомошью кнопотс SB и SBm установить выходной сигнал регулягора равным значению входнот о сигнала ЭПП. На БРУ-2К нажать кнопку SBa- После этого регулирующий орт ан управляется с помощью ктюпок SBg и SB блока БРУ-У. Включение автоматического управления. Задагчиком РЗД (I) добиться нулевого сит-пала рассогласования на входе регупятора. контролнруемот о вольтметром Р1, и iia-жать кнопку SBa на БРУ-У. Переход с автоматического управления на ручное через РБА от БРУ-У. Кратковременно нажать на кнопку SB или Sfi; блока БРУ-У. Регулятор ттереключится на ручной режим. nocJTe этого выходной сигнал регулятора можно изменять только с помощью кнопок SBb н SSm Перкход на ручное управление с РЗД (II) помимо регулягора. Указатель устав1сн РЗД (II) установить на отметку (в процентах), равную значению указателя БРУ-У, и на БРУ-2К нажать кнопку SBp. 4,4, УСТРОЙСТВО РЕГУЛИРУЮЩЕЕ РП4 Устройство входит в состав комплекса технических средств АКЭСР-2 и формирует зак01т ПИ-регулирования в комплекте с исполнительным механизмом постоянной скорости Алгебраическая сумма входных сит налов демпфируется. С учетом этот о передаточная функция регулятора, как и для регул:нрую1т(его блока РБИ, определяется выражением (4.1). Устройство регулируютт[ее РП4 имеет модификации РП4-У, РП4-Т и РП4-П, ко-торьте отличаются видом входных сигналов, диапазонами их изменения, входными сопро-тивленнями, числом входов, возможностями дне I анттионной подст ройки параметров и т. д Регутирующая часть схемы устройства РП4 всех модификаттий одитгакова. Рассмотрим функциональную схему ре-I улирующего устройства на примере модификации РП4-У (рис. 4 20) Схема состоит из входнот о сумматора /, демттфера 2, операционного усилителя-сумматора 5, трехпозиционно! о устройства 4. инертшонного звена отрицательной обратной связи 5, источника питания 6, задатчика 7. Схема работ ает следующим образом Сигналы рет yjmpyeMoro параметра и задания поступают на входы сумматора /, в котором происходит их алгебраическое суммирование и формируется сигнал рассо-TJTacoBaHHfl. Сит нал рассогласования через масшта-бирук)[цее устройство постуттаег на демпфер 2, прсдстат1ляюший собой инерционное JC-звено с peryjTHpyeMOH постоянной времени Тф С выхода демттфера 2 сигнал рассогласования поступает на вход операционного усшш;еля-сум.матора 3. с выхода которого он поступает на вход трехпозиттионного устройства 4, нмеютцето регулируемую зону нечувствительтюсти Днч При сигнале рассогласования, ттревышающсм порот срабатывания, трсхпозиционное устройство срабат ы-вает; при этом скачком подается cHrnaJT в цепь отрицательной обратной связи, пред-
Входы 0-т 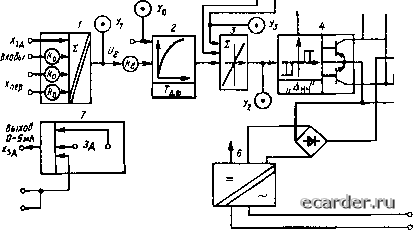
Рис. 4.20. Функциональ)1ая схема регулирующего устройства РП4-У ставляюшей собой активное инериионнос RC-звепо 5, н на выходные ключи, коммутирующие цепи внешней нагрузки в зависимости от полярное!и сигнала рассогласования. При сраба1ывании ключа, соответствующего полярности сигнапа рассогласования, на выходе появтястся напряжение На рис.42] приведена зависимость выходно! о напряжения от тока ншрузки. При отключеппой цепи отрицательной обратной связи РП4 представляе! собой грехпозиционное устройство t i HciepejHcoM. При включенной цепи отрицатечьной обратной свя ш и срабатываннн трехпози-[1ИОНН01 о устройства 4 сигнал отрицательной обратной связи на выходе инерцнонного звена 5 начинает плавно увеличиваiься и компенсировать сигнал рас<.01ласования на входе 011ерйч.иоино1о усилителя-сумматора 3. Си1иал на входе трехпозиционного устройства 4 плавно уменьшается до порога отпускания, после чего трехпозиционное устройство отключае1ся, ent налы на выходе устройства и на входе отрицательной обратной свяш скачком уменьшаются до нуля. Сигнал отрицательной обратной связи на выходе инерционного звена 5 начинаС! п тав-110 уменьшаться, а cni нал на входе трехпозиционною устройства 4 возрастает до порога срабатывания, после чего устройство срабатывает, включает выходные ключи, при этом ситнал 1Одаеея в цепь офицатепьной ображой связи. При сохранении сигиала рассогласования цикл повторяется.  SO 75 100 125 1,мЛ Рис. 4.21. Зависимость выходного напряжения от тока нагрузки регулирующего устройства РП4-У Таким образом, устройство регулирующее РП4 формирует на выходе импульсы, следующие с определенной часшюй. Инте-грированне этих импульсов при помощи исполнительно! о механиша постоянной СКОрЮ-сти нозвоияет получить пропорционально-интегральный закон регулирования Работа регулирующею усЕройства при включенной отрИ1,а1ельной обратной связи и скачкообразном сигнале рассогласования У, Показана на рис. 4 10. Длительность первого импульса ДГиуп п (пропорциональная часть закона ретулирова-ния) зависит от значения сие нала рассогласования Ьг и ко»ф4>ициента передачи к„ и!]ер-пионною шена 5. Коэффициент передачи ftp ре! улятора, образованного регулирующим устройством РП4 и исполнительным механизмом постоянной скорости, определяется вьфаже-ннем /ср=100Л„/7„м, (4Л9) где кп ~ коэффициент передачи устройства, Тим - время полного хода исполнительного механизма, с. В результате интегрирования последующих импульсов Д(имп и получаем ингетраль-ную часть регулятора, которая характеризуется постоянной времени интегрирования Т„ инерционного звена 5. Коэффициент передачи к, и постоянная времени интет рнровання = Т"из /к„ уста-навливаю1ся при помощи переменных резисторов заряда и разряда активного инерционного КС-звена 5. Длительность интетрирующнх импульсов ДГими и на выходе устройства РП4 устанавливается при помощи сигнала дополнительной положительной обратной связи, поступающе! о с звена 5 на вход операционного усилителя 3 и расширяющего зону возврата Дв трехпозиционного устройства 4 при срабатывании. Во время паузы эют сшнал отсутствует. Минимальная длительность импульса формируется при малых сит налах рассогласования Прн увеличении сигнала рассогласования ;иштельность импульса увеличивается. Минимальная длительность нмпу.тьса, устанавливаемая ручкой «Днмп», определяет статическую точность peryjmpoeanHH в автоматической системе. В схеме РП4 предусмотрена дистанционная в три ступени подстройка коэффициента передачи кп и постоянной времени изодрома 7иэ путем подачи на входы и / ступени подстройки напряжения 24 В постоянно/о тока. Контроль срабатывания устройства РП4 по направлениям работы осуществляется при помощи световых индикаторов HLi и HL2. Для контроля работы устройства служат контрольные гнезда. Питание схемы осуществляется от источника питания 6. Устройства РП4-У, РП4-Т и РП4-П отличаются только схемной реализацией входного устройства / и задания 7 Регулирующее устройст во РП4 имеет такие же параметры настройки, как и регулирующий блок импульсный РБИ, методы проверки и настройки которого изложены в § 4.2. 4.5. РЕГУЛИРУЮЩИЕ БЛОКИ ИМПУЛЬСНЫЕ РБИМ Блоки РБИМ входят в комплекс электрических средств pei улирования н функциональных приборов ГСП в микроэлектронном исполнении. Блок РБИМ реализует закон ПИД-регулирования с демттфировапнем в комплекте с исполнительным механизмом постоянной скорости. Передаточная функция регулятора УМ = [Лп/(ТдфР + 1)] [1 + 1/{Т„зР) + 7„вР], (4.20) где кп - коэффициент передачи РБИМ; 7дф - постоянная времени демттфироваиня; - тюстоянная времени изодрома; Т ~ постоянная времени предварения. Блоки РБИМ выпускаются 6 типов и 20 модификаций приборного (П) и шкафнот о (Ш) исполнений. На рнс. 4.22 приведена структурная схема блока РБИ4М-Ш с аналоговой и дискретной дистанционными настройками параметров. Блоки других модификаций либо имеют один внд дистанционной настройки, либо дистанционной настройки не имеют. Исключая из схемы рис. 4.22 элементы, относящиеся к одному (или обоим) нз видов диста1ЩИОНной настройки, можно получить структурную схему блока любого типа. Так, блоки РБИ1М-П и РБИ1М-Ш, в которых нет дисганцнонной настройки параметров, имеют блок сравнения /, выход которого через фильтр 2 соединен с входом дифференциатора 3 и трехтюзиционпйго релейного блока 4. Выход трехпозиционного релейного блока 4 через первый целитель 5 связан с входами масштабирующего звена 6, выполненного на операционном усилителе Оу и второго делителя 7. Выход дифференциатора 3 соединен с входом первого сумматора 8, второй вход которого подключен к выходу масштабирующего звена 6 н ко второму входу трехпозиционного релейного блока 4, а выход через конденсатор 9 соединен с суммирующей точкой операционнот о усилителя. Третий вход и выход трехпозиционного релейного блока 4 связаны соответственно с выходом второго делителя 7 н входом усилителя мощности 10, выход которого является выходом регулирующего блока. Перемычка между выходом фильтра 2 и входом дифференциатора 3 может быть снята, а на вход дифференциатора также через перемычку может быть подан внешний сигнал Лвнеш- 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 [43] 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |