
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 [56] 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 циональное входному сигналу t/g и коэффициенту передачи к. Коэффициент усиления регулятора кр = (Ди/17е) 100 = (к„ /Тим) 100. (4.71) Диапазон уставки кр зависит от постоянной времени ИМ Тим- Если, например, Тим = 45 с, то р.мйн = (п.мин/Тим) 100 = 0,3 100/45 = 0,666; кр шкс = (и м.1кс/Тим) 100 = 10 100/45 = 22,2. После первого импульса включения ИМ в момент перехода в нейтральное состояние грехпозиционпого звена исчезает сигнал положительной обратной связи 1/п о с- За счет этого в первый момент сигнал t/o о с оказывается больше сигнала на величину С/ц о Напряжение Uooc начинает уменьшаться с постоянной времени Т. Котда напряжение Uo о l после делителя с коэффициентом передачи it = 0,25 изменится на величину t/n о.с произойдет повтортюе срабатывание трехпозиционного звена. Время паузы - время с момента окончания перво! о импульса включения до последующего импульса включения: пауз - fii о с/раз» где Kpaj - скорость уменьшения о l после делителя с к = 0,25. Скорость уменьшения Uo о i. до делителя Соответственно Каз = 0.25Кра.. = 1/с/(2Т) Таким образом, длительность паузы ДГг,ал = 217„.осТ/С/,. (4.72) После паузы снова сраба1ывает трехпозиционное звено, на его вход поступают fn о с и to о с- Когда Uooc скомпенсирует значение t/e+ п о с, трехпозиционное звено снова переходи г в нейiральное состояние. Длительность импульса последующего включения = 2U, (4.73) где 2Ua 0 0%.- эначение t/„ о о приведенное к входу до делителя к = 0,5, в процентах максимальною сигнала 10 В. При постоянном значении t/g после последующего импульса включения следует пауза, затем снова импульс включения и т. д. Время, за которое ИМ в результате по-атедующих импульсов переместится на рас- стояние, равное перемещению от первого iDvinynbca, является временем удвоения. Определим его. Число последующих импульсов, необходимое для удвоения, П = АГимп п/имп и - = U,kJ(2U„oJr,)-Q5U,/U„o,. Время удвоения при пренебрежении длительностью последующих импульсов включения ( = пА(„ар = (0.5I7g/I7n о с)(21/п о сТ/и,) = Т. Следовательно, время удвоения равно постоянной времени звена отрицательной обратной связи и не зависит от к„. Поэтому tT = Ги1, где с учетом (4.65) 7"ш - HjCg/fen (4.74) Для исполнения «1» модуля С, = -6,8 мкФ, 32 = 30 МОм, 33 = 3,3 МОм, fc„,=0.1 1. Следовательно, из = зг = 30 МОм, Гит = 306,8/;£„, = 200/;£нз при переключателе $2 В положении «X 10», откуда Тиз мин" = 200 с, Т„з макс = 2000 с, R„3 = = 3233/(32 + R,) = 3 МОм и Тиз = = 3 6,8/Hj = 20/из при 2 в положеиин « X 1», откуда = 20 с. Т„з кс = 200 с. Таким обраюм, при T,ih = О модуль совместно с ИМ постоянной скорости реализует закон ПИ-регулирования. Длительность интегрирующих импульсов. Длительность интегрирующих импульсов устанавливается потенциометром Кич, шкала «Аг„мп» которого расположена на па-HCJiH органов настроек. Решая совместно (4.43), (4.69) и (4.64), получаем Аим,,« = 60д, . (4.75) Следовательно, длительность А/имп и> с, не зависит от к„ (т. е. от кр) и равна значению, установленному по шкале «Днмп»- Это является достоинством peгyJшpyющeI о модуля. Интегральная составляющая выходного сигнала при изменении к будет изменяться за счет изменения д:штельности пауз. При одном и том же cnrnajre рассогласования t/g длитeJ[Ьнocть пауз между последующими импульсами включения ИМ будет возрастать с уменьшением к. Длительность последующих импульсов останется неизменной. Предел уставки ДГимп и иа шкале «Ai„mii>> определяется диапазоном изменения коэффициента передачи к, для крайних положе- НИИ движка потенциометра Ry Так как Д.м,, = 0,0016+ 0,0132, то Д1„мпи=60;сд, соответственно изменяется в пределах от 0,1 до 0,8 с. Реализация закона ПИД-регулирования Регулятор реализует закои ПИД-регулирования прн включении дифференциатора (переключатель S, устанавливается в положение « X 1» или « X 10»), Дифференциатор выполнен на высокоомном усилитсче (рис. 4.44). На вход усилителя через дифференцирующую емкость С; поступает сигнал 0,5С/е. Усилитель охвачен ре[ улируемои отрицательной обратной связью через сопротивление при переключателе Si в положении « X 10» или через параллельно вклю-ченнь[е сопротивления Я, я при S, в положении « X 1» (см. рис, 4.39). Скорость обратной связи устанавливается потенциометром делителя на сопротивлениях Rjp, i?i4, Ryy Коэффициент передачи fe делителя изменяется в пределах 0.1 - 1. Дополнительно для реализации реального дифференцирующего звена усилитель охвачен обра)нон связью через емкость С. На схеме рнс, 4.44 Кд = Л7 при в положении « X 10» и = R,Kg/(i?7 + Лв) при Sf в па1южении « X 1». На основании закона Кирхгофа где == С2 О,5(й[/е/й0 - ток через емкость 21 ic\ = C{dU/dt) - ЮК через емкость С; л =t/j/Rj-tok чере* резистор Кд. После преобразований получим (0,5ЛдС,/М(Е/г/0 = Е/д + (CRjk,]{dUJdl). Передаточная функция дифференциатора (д(р) = ад(Т1р+1). где Тд = 0,5С2Лд/Лд - время дифференцирования; Tj = Скд/кц - постоянная времени реального дифференцирующего звена; отношение T,/Ta = 2C4/Ci. Емкости Сд = 1 мкФ и Сд = 2,2 мкФ, Следовательно, Tj и передаточная функция дифференциатора д(р)=ТлР/(ГдР+1). Это - реальное дифференцирующее звено с коэффициентом передачи, равным 1. Для исполиеиия «1» модуля Rj = = 36 МОм, i?8 = 3,9 МОм. С учетом этого /?д=К = 36 МОм прн Si в положении « X Ю» и йд = R.,Rg/(R, + Рис. 4.44. Принципиальная электрическая схема дифференциатора ±10Ь 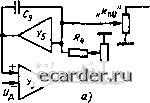 Рис. 4.45. Принципиальная электрическая (я) и структурная (б) схемы формирования (Joe по входу (7т модуля Р027.1 + Rg) = 3,52 МОм при Sj в Положении « X 1». Соответственно Гд = OjSCjj/fca = = 0,5 2,2 36/Лд = 39,6/fej при S, в положении «х10» и Г=0.5.2,2-3,52А,,= 3.872Дд нри Sj в положении « х 1». Так как /сд s 0,1 + 1, зо полный диапазон изменения Тг, а 4 + 400 с. При il в положении «Выкл>> усилитель У охватывается пубокой отрицательной обратной связью и Uji = 0 независимо от и,. Выходной сигнал дифференциатора t/д подается на вход сумматора цепи обратной связи регулирующего модуля (см. рис. 4.43, а). Вследствие этого появляется дополнительная составляющая (Уо.с сигнала от-рицагельной обратной связи Е7о о.с. которая уменьшает С/. о нри формировании перво! о импульса включения ИМ, увеличивая пропорциональную составляюную изменения выходного сигнала регулятора. Принпипиальная элект-рическая схема формирования составляющей сигнала обратной связи [/о. с приве;1ена на рис. 4.45, д. Сигнал [/д поступает на вход сумматора, охватываемого отрицательной обратной связью через интегратор, постоянная времени интегрирования которого Та- Передаточная функция цепи формиро- Рис. 4.46 Структурная схема формирования закона ПИД-регулирования peryjiHiopa Р27 вания (7о t ь соответствии со структурной схемой на рис 4.45,6 Сигнал с изменяется аналогично сигналу Uf Поэтому формирование закона ПИД-регулирования регулятора можно представить в виде структурной схемы, приведенной на рис 4.46, где кр{\. + + I/ThiP) -передаточная функция ПИ-рсту-лятора; Ид(;) - передаточная функция узла предварения; - передаточная функ- ция учас1ка цепи ООС; ц - изменение положения исполнительного механизма; Ti = = Ти - пос гоянная време!ш изодрома. Передаточная функция ПИД-рсгулятора пид (Р) = 1,(р)с. (Р) + 1] Ар Г1 + После подстановки значений УУ{р), еО) и преобразований получаем пид(р) = Лр[1 + VT«,p -ь TpliJp + 1)], (4 76) где Ар = Л,, ЮО/Гим - ко*ффициент передачи ПИД-регулятора; Гим - посюянная времени ИМ; Г„э - постоянная времени изодрома ПИД-регулятора; Гцв = - постоянная времени предварения пИД-регуля-тора, Таким образом, схемой модуля Р027.1 реализуется идеальный закон ПИД-регули-ровапия с демпфированием дифференцирующей составляющей, коэффициенты настроек коюрою взаимно не связаны. Эю упрощает динамическую настройку регулятора в части реализации расчетных коэффициентов. 01раничение воздействии по сигналу рассогласования Моду.чь ttMeei ограниченную зону работы в ПИ- или ПИД-режиме при изменении СИ1 нала рассогласования + Значение рабочей зоны при реализации закона ПИ-pei улирования зависит от коэф- фициента передачи Лц и времени изодрома Тиз, которые усыновлены на модуле Эго вызвано тем, что от значений и Tj завн-СИ1 максимальное значение сшнала отрицательной обрашой связи При формировании первою пропорционального импульса включения ИМ Решая coBMeciHO (4.66)-(4.68) и (4,74), получаем максимальное значение сигнала oTpHHd!ельиой связи Ги./(5и. (4.77J Рели учесть, что по каналу обрашой связи коэффициент передачи в 2 раза меньше, чем по сигналу рассогласования, то максимальное значение и, ма., которое может скомпснстфовать обрагная связь. = г.люки) (4.78) Например, если Г„т= 100 с и /сп = -0,5 с/%, го С.ма«= 100/(10-0,5) = 20% ичи (10/100)-20 = 2 В. Кроме IOJ о, по мере приближения к fEMSKc фактическое значение к„ будет увеличиваться, гак как t/o о с растет по экспоненте н скорость роста (7о о с уменьшается При ti.teMaKc перемещение ИМ будет непрерывным. Таким образом, козффициенг передачи /;р регулятора будет нелинейным в функции сигнала расхотласовашы И. По мере приближения к Ь/емакс коэффициент усилення будет равен бесконечности. Фактическое значение кр будет близким к реализованному, если сишал рассогласова-иш Е8-еО,5[7,,а,,= Т„з/(20Лп). При малых значениях к„(0,3 ~ 4,0>имеется ограничение по уставке длительности интегрирующих импульсов ДГимп и И зоны не-чувств1ггельнос1И Д„ч. При A„ = const чем меньше fe,„ тем меньше максимальное 1наче-ние А1„„„и- Ьсли Дг,™п.„ по шкате «АГнмп» установить больше донусжмою, то возникает режим автоколебаний (модуль непрерывно срабатывает в сторону «Больше» и «Меньше» с постоянной частотой), В свою очередь при /с,, = const максимальное значение АСимп ш которое можно установить по отраниченшо срыва в режим ая1околс6ли1Я.&, увеличивается с увеличением Днч- Это объясияен-я тем, что напряжение положи 1ельной обратной связи f,, о о счет которого реализуется зона возврата 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 [56] 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |