
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 [65] 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 вают давление по манометру 100 кПа. Затем отключают давление и полностью открывают переменный дроссель При нормальной пропускной способности сумматора сброс давления от 60 до 50 кПа произойдет в течение не более 2 с Пооге *того следует завернуть постоянный дрюссель. При понностью открытом переменном дросселе давление в сумматоре не должно превыша1ь 4-5 кПа. Прюмса коэффнннеига передай. В устройствах пневмоавтоматики давление Рд называется давлением контрольной точки. С учетом этого выражение (5.10) в отклонениях выходного сигнала от конфольной точки (Рвых = -Pq запишется в виде &Рг,ых=кЛР ДР.„х=аДР/(а + Р)- Таким образом, изменение выходного сигнала в прирап1винях от установленного значения давления контрольной точки пропорционально изменению входного chi нала в тех же приращениях. Коэффициент передачи Ус, = а/(2 + р) настраивают путем изменения степени закрытия персмашого дросселя в .чиапазоне от О при полностью открытом переменном дросселе (р -»оо) до 1 при пошостью закрытом переменном дросселе (р = 0). С учетом некоторого пропуска воздуха при полнос1ЬЮ закрытом перемешюм дросселе (р ? 0) и некотором его сопротивлении при полном открытии ф оо) при проверке дроссельного сумматора диапазон изменения fc, должен быть не менее l/30j$/tl. Пневмоповторитель пневматического сигнала Для реализации операгши повторения сигнала отечественной промышленностью выпускаются специальные элементы - [жев-моповторители. На рис. 5.10 приведены yCJювныe изображения двух пневмоповторителей, из ко- торых очевидно их конструктивное исполнение. Пневмоповторитель на рис. 5.10,а типа П2П.1 имеет две камеры. Камеры разделены тибкой мембраной с жестким центром, который выполняет функцию «заслонки» для сопла С и через который камера А сообщается с атмосферой. В камеру Б nojiaercfl входной сигнал Рх- В камеру А через постоянный дроссель подается питание Рц. Пневмоповторитель работас! по принципу компенсации сил на гибкой мембране. Например, при возрастании Р„х мембрана прогибается вниз, прикрывает сопло С, уменьшается выход воздуха нз камеры А в атмосферу В результате этого давление Рвых в камере А возрастает до значения Pg,. Таким образом, пневмоповтори1ель на рис. 5.10,а все1ла обеспечивает условие Рвых = Рвх- Пневмоповторитель на рис 5.10,(j типа П2П.2 отличается тем, что имеет дополнительно две пружины разной жесткости. В результате этого [жевмоповторитель на рис, 4.10,6 повторяет входной сигнал со сдвигом: Раых = Рвх + АРл, где ДРвх - значение сдвига, определяемое разностью натяженнй пружины. Значение сдвига может устанавливаться вручную оператором пугем врашешы винта натяжения верхней пружины. Пневмоповторители проверяют на герметичное гь и погрешность повторения входного си> нала. Проверка на герметичность не имеет принципиальных отличий от общей меюдики проверки герметичности мембранных элементов. По решность повюреиия пиевмоповто-рителя П2П.1 определяется как разность значений давлений на входе и выходе: Рвих- - Рвх = ± Д при Рвх = 20, 60 и 100 кПа. Она не должна превышать ±0,25%. Погрешность 1Ювтореиия пневмоповто-ритедя П2П 2 не должна превышать ± 0,5 %. Диапазон сдвига должен быгь не менее ± 15 кПа. вых -*-о вых -*-о Рис. 5.10, Пневмоповторитель (а) и пневмоповторитель со сдвигом (6) Погрешность сдвита (установленной разности входного и выходного сигналов) допускается не более ± 1 % рабочего диапазона выходного сигиала, т. е. ± 0,8 кПа. Если при установке значений сдвига ао-грешность повторителя не укладываегся в допуски погрешности, следует проверить соосность установки пружин и мембраы в элементе. Реле выключающее ycjmBHoe изображение выключающего реле типа П-1108 представлено на рис. 5.11. Реле состоит из трех камер, разделенных гибкими мембранами. Жесткие пентры ! и 5 этих мембран соединены жестким штоком 2. В глухую камеру А подается командный (управляющий) си[ нал (давление) Pj, глухая камера В сообнтена с атмосферой. В камере Б pa(;пOJюжeны сопла С, и Cj. для которых торцы жестких неитров мембран 1 п 3 служат заслонками. К соплам С; и С2 подводятся входные сигналы Pbi и Рвх2- Давление воздуха в камере Б служит выходным сигналом реле, Выключающее реле обеспечивает следующие режимы работы: а) при командном сигнале Р, равном О, пружина отжимает мембранный блок вниз, сопло Cj открывается, сопло Cj закрывается и сигнал иа выходе реле Рн,,, будет равен входному сигналу Pxi: PebixPoNi; б) при Рк > о мембранный блок перемещается вверх, сопло С[ закрывается, сопло открывается и си нал на выходе реле Рвых = Р«\2- Таким образом, пневмореле обеспечивает переключение каналов связи пневмоли-ний. Реле может быть использовано и для управления одним входным сигналом. В этом случае вход одного из сопл заглушается. При Этом реле может работать в следующих режимах: при заглушённом С: Рвых = Рвх при Р > о, Рвых = О при Р = = 0;
при заглушённом Cj: Рвых = Рвх при Рк = О, Рвых = о при Рк>0. Выключающее реле гфоверяется на герметичность, на герметичность запирания сопла С и свободное прохождение воздуха через coпJю С; при Рк = 110 кПа. Пневмоповторитель - усилитель мощности Наиболее широко в системах пневмоавтоматики применяется пневмоповторитель - усилитель мощности типа П2П.7. Он предназначен для создания выходного сигиала, равного по давлению входному сигналу и усиленного по расходу. Пневмоповторитель состоит из четырех секций (рис. 5.12) и трех плоских резинотканевых мембран (5 - 7), образующих совместно шесть камер (А - Е), а 1акже клапана и двух пар «сопло ~ заслонка». Входное давление через канал 10 подается в камеру Д. Давление питания через канал 9 поступает непосредственно в камеру А и через пневмосопротивление S, конструктивно встроенное в элемент, - в камеру В. Выходом элемента является канал 7 Камера В является емкостью, заключенной между нерет )j[HpyeMbiM пневмосопроти-влением 8 и пневмосопротивлением, обра-1уемь[м парой «сопло - заслонка» 3. Выходная камера Б соединена с камерами отрицательной обратной связи Г и Е. При увеличении входного давления в камере Д сброс в атмосферу через пару «сопло - заслонка» 4 уменьшается, мембраны 6 н 7 прогибаются и выходное давление возрастает. При уменьшении выходного давления, например вследствие увеличения расхо- 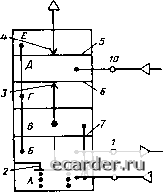 Рис. 5.11. Реле выключающее Рис. 5.12. Пневмоповторитель - усили гель мощности типа П2П.7 да в выходной коммуникации, пневмоповторитель рабо1ает аналогично. При уменьшении входного давления и сооi не i с [ ByiouieM уменьшении давления в камере В или [фИ увеличении выходно! о давления, например вследс! вне повышения давления питания, и при неизменном входном давлении в камере е проходное давление пары «сопло - заслонка» 4 увеличивается и давление на выходе ппевмоповторителя уменьшается. Пневмоповторитель ~ усилитель мощности проверяется на герметичность, на по-1 решнос1Ь повторения входного сиг на.[а и на наличие порога чунсгви] ельнос! и. Допустимая погрешность для пневмоповтори-теля - усилителя мощности должна быть не более ± 0,5 % рабочего диапазона изменения входного сигнала, т. е. Д 80-0,005 = 0,4 кПа. Поро! чувс! вительнос! и должен бьпь не более 0,1 рабочего диапазона изменения вхохщого сигнала. fs 17 /« is *12 л Рис. 5.13. Принципиальная схема пневмо- повторитсля типа ПАМП-!: /-входной канал пневмосоирО!ивления; 2, 70 - каналы камеры т, 3 - клиал сопла 17; 4, 6 - каналы камер Б и В; 5 - выходной канал элемента; 7 - канал камерр.] а; 8 - вычодпой каиал пневмосопротивления 18, 9 - канал лля поступления давления питания, П - выходной канал сопла 13; 12 - выходной канал пневмосопротивления; 14 - пружина; i5 - резинотканевое полотно; i6 -поли JгилeнтepeфlaJldнaн пленка; 17 - сопло; is - пневмосопротивленис 5.2.КОМПЛЕКС ЭЛЕМЕНТОВ И МОДУЛЕЙ ПНЕВМОАВТОМАТИКИ В настоящее время наряду с элементами УСЭППА приборостроительной промыш-леннос1ью выпускался новый комплекс элементов и модулей пневмоавтоматики (КЭМП). Элементы и модули КЭМП отличаются от Элементов УСЭППА существепно меньшими габаритными размерами, большим сроком службы, лучшими 1ехническими характеристиками основных парамегров. Методы проверки и настройки злементов и модулей КЭМП и элементов УСЭППА не имеют принципиальных различии. В качестве примера рассмотрим устройство и принцип действия некоторых элементов КЭМП. Пнсвмопов I ори I ель типа ПАМП-1. Пнев-моповюриle.Tb [фелна!начен для создания ВЫХОДНОЕ о си[ нала, равною \\о дав.тению входному СИ1 налу. Пневмоповторитель (рис. 5.13) сосгои г из двух секций, металлических и резинотканевых прокладок, мембраны из полиэтилеп-терефталатной (лавсановой) пленки 16, мембраны И! peiHHoiканено[ о полотна /5, двух пар «сопло - заслонка». Секции, прокладки и мембрань[ образуют четыре камеры - л - г. Давление питания подается в канал 9 и поступает в камеру а через пневмосо[ф01 ивленне 7?, конструктивно входящее в повторитель. Вхо.т-ной сигнал через каналы 4 и 6 подастся в камеры £ и В. Выходом элемента является канал 5. Давление в камере г от.тичается от давлении в камерах а ~ в гфи любом входном дав.гении на постоянное значение, обусловленное усилием пружины 14. При изменении входного давления меняется зазор между соплами и мембранами, вследствие чего изменяется расход воздуха в атмосферу, а следовательно, и выходное давление. Каждому значению входного давления соответствует такое положение мембраны, прн котором давления в камерах а - б равны. Порог чувствительности элемента - 0,05% рабочего диапазона изменения выходного сигнала. Пневмоповторитель со сдвигом типа ПАМП-2 предназначен для создания выходного сигнала, отличающегося по давлению о[ входнО[ о СИ1 Haj[a на постоянное значение (СДНИ! ). Давление питания [юдается к каналам 9 и /2 (рис. 5 14) и поступает через пневмосо-[фошвлении 13, 19 соо1веС1венно в камеры В - Г и камеру В. Входное давление через канал 6 подается в камеру а. Выходом элемента является ка1ьгп 4 из камеры б. Установка сдвига производится винтом 17. Каждому [юложению установочно! о вин-la cool Bci С1 вуе[ определенное значение слви[ а. Выходное давление боль[1[е или меньше входного на значение сдвига во всем диапазоне изменения входного сигнала. При увеличении входного давления мембрана 18 прогибается в сторону камеры Б, перекры-вае[ соп.чо шариково! о ю[апана 7.5, давление в камере в повышается, мембрана 14 проги- 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 [65] 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |
|||||||||||||||||