
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 [68] 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 Купить аккумулятор для автомобиля - авто аккумулятор купить www.top-detali.ru. ния (рис. 5.22,1 откуда - h - в- Из сравнения рис. 5.22,6 и в следует, что реальное звено прямого предварения в динамическом отношении с достаточной для практических расче i ов т очносз ью можно представить в виде идеального блюка предварения с постоянной времени предварения Ипв(/) = ТпвР-Ь1. Г™ = (1-1Д)Т„. (5.33) (5.34) При реализапии звена прямого предварения по схеме на рис. 5.15,в Гив = (1-г)7е (5.35) С учетом (5.34) действительные передаточные функции (5.27) и (5.28) звена, выполненного по схеме на рис. 5.21,а, запишутся в виде W(p) = k2T,,BP/(k-l) + V, (5.36) W5(p)=yikT„,p/{k--i)+ll (5.37) Соответственно с учетом (5.35) для схемы на рис. 5.21,6 получим ИивН= W(l-y+ 1, (5.38) W6(p) = l/[fc,TnBP/(l-M + i]- (5.39) Дифференциальный делитель давлении В различных устройствах ттневмоавтома-тики находят тттирокое применение дифференциальные делители давления из переменных и постоянных пневмосопрот ивленнй (дросселей), образующих четырехполюсник на два входа и два выхода, принципиальная схема которот о представлена на рис. 5.23. Дифференциальный делитель давления по каналам 1-3 и 2-3 можно представить как дроссельный сумматор (см. рис. 5.9), для которого по каналу 2-3 проводимости «2 и Р дросселей и / соединены последовательно. С учетом этого запишем 1/«2-3 = 1/«2+1/Р, л р. Рис. 5.23. Принципиальная пневматическая схема дифференциального делителя давления С(2.з = С(2Р/(а2 + Р), т де «2-3 - проводимость дифференциального делителя давления по каналу 2-3. С учетом (5.6) запишем P3Bbix = aiPlBx/(ai +«2-3) + + а2-зР2вх/(а1 +с(2-з) Р3вых= [ат(а2 + P)PlBix+ «гР X X Р2вх] / [«10(2 + («1 + «2) Р]- (5.40) Аналогично Р4ВЫХ = ai.4PlBx/(«2 + «T-4) + + агРьх/(а2 + а1) P4Bb,x = [aiPPiBxa2(«i +Р) P2Bx]/[aiaz + (5.41) где «1.4 = «1 p/((Xi + Р) - проводимость дифференциального делителя давления по каналу 1-4. Если за вход дифференциального делителя давления принять разность ДРв = = PiBx ~" Р2в\< 3 за выход - разность ДРвых = - Рзвых - Р4вых, ТО С учетом (5.41) и (5.42) получим ДРвых = «тагДРвх/ [«[«з + («1 + «2) р] (5.42) ДР«,.,. = кАРи (5.43) = = «1«г/[«1«2+-(«1+а2)Р] (5.44) - козффициенг передачи дифференциального делителя давления тто каналу «ДРвх ~- - ДРвых». В пневматических регулирующих устройствах проводимости постоянных дросселей с([ и а, как прави:то, примерно равны. В этом случае коэффициент передачи (5.44) будет равен fc = c(/(«-b2p). (5.45) При полностью закрытом переменном дросселе Р-+0, к = \\ при полностью открытом р -» со, - 0. Таким образом, при настройке дифференциального делителя давления (рис. 5.23), регулируя степень открытия переменного дросселя, коэффициент передачи можно плавно изменять от О до 1. 5.4. ОБЩИЕ ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ И МЕТОДЫ ПРОВЕРКИ ПНЕВМАТИЧЕСКИХ РЕГУЛЯТОРОВ Общие технические фебования и ме-юды проверки пневматических регуляторов oпpeлeJ[яюlcн типом регуляторов по ГОСТ 9988-84. Тип регулятора по ГОСТ 99t8-84 определяется его законом регулирования: ПЗ-1 - позиционное регулирование, ПЗ-2 -позиционное регулирование с зоной возврата, П - пропорниональное регулирование, ПД-1 - пропорционально-дифференииальпое регулирование, ПД-2 - прямое предварение, ПД-3 - обратное предварение, ПИ - про-порцнонально-интегральное регулирование, ПИД - пропорционально-ин1е[рально-диф-ференциальное регулирование. Технические требовании Регутяторы должны быть изготовлены в соответствии с требованиями ГОСТ 9988-84, ГОСТ 13053-76, технических условий на регуляторы конкре1ных 1ипов по рабочим черЕежам, утвержденным в установленном порядке. Пределы допустимой основной погрешности Y в проненгах от нормируюпе! о значения вх0дн01 о (выходного) сигнала выбираются из ряда ±0,25; ±0,4; ±0,5, ±0,6-± 1,0. За основную погрешность следует принимать : а) лля регуляторов типа ПЗ-1 - наибольшее значение входною chi najia, при котором выходной си1 нш[ изменяется от ниж-не1 о до верхнего ити от верхнего до нижнего предельного значения и которое выражено в процентах от нормирующего значения входного сшнала; б) для peiyjihropob типа ПЗ-2 - наибольшую рашость установленного предельного х±0.5Де и действительного значений регулируемой величины, при ко юрой выходной сигнал и шеняется от нижнего до верхнего или от верхнего до нижнего значения и которая выражена в процентах от нормирующего значения входного сигнала, в) для регуляторов типов П и ПД с ш-пой пропорЕШОнальносги 5<100% -наибольшее значение входного сигнала, выраженное в процентах нормирующего значения входного сигнала при значении выходного сигнала, равном у, а с зоной пропорцио- нальнос1и 5 5 100%- наибольшую разность значений выходного сигнала и Уц, выраженную в процентах рабочего диапазона изменения выходного сигнала, при значении входною СИ! нала, равном пулю; г) для регуляторов типов ПД-2 и ПД-3 - наибольшую разность входного и выходного сигналов, выраженную в процентах нормирующс! о значения входного сигнала при установижинхся значениях входного и выходного сигналов; д) для ретуляторов типов ПИ и ПИД -наибольшее значение входного cni нала, выраженное в процентах нормируюте! о значения входного си[на.ча при установившемся выходном сш нале. Изменение погрешности при изменении зоны пропорпиональностн в пределах шкалы не должно превышать значений, указанных в технических условиях на pei уляторы конкретных типов. При гом указанное изменение погрешности при зоне пропорциональности, равной 250 % и менее, не должно превышать значения предела допустимой основной погрешности, а при зоне пропорцио-нальпости, превышающей 250%, это изменение не должно превышать 0,005 5у, по не более 2 у. Допустимые отклонения действительных значений параметров настройки от значений, указанных па шкалах органов настройки регуляторов, должны бьпь ус1ановлены в долях номинальных значений числовых отметок шкал и не должны превышать шачений, указанных в табл. 5 2 Нелинейность ст а[ических характеристик цяя регуляторов типов П. 11Д. ПИ и ПИД устанавливают в технических условиях на регуляторы конкретных типов Динамическая погрешность регуляторов аппаратного типа пе должна превышать 10% по модулю и 15" по фазе ттри частотах о) 0,1 рад/с для регуляторов типов П и ПИ и при l/TtiR ра;т/с дня регуляторов типов ПД, ПИД при постоянной времени лредва-рения TfiH 10 с. Регуляторы в местах уплотнений должны быть герметичными при давлении воздуха 160 кПа. Pel уляторы аппаратного типа должны вьщерживать перегрузку по входному сигналу до 140 кПа для изделий, аттестованных по первой категории качества, и 154 кПа для изделий, аттестованных по выстией категории качества. Регуляторы приборного типа должны выдерживать перегрузку по входному сигналу, на 25% превытттающую его граничное рабочее шачение. Таблица 5.2. Допусшмые отк-юнеиня значащи параметров настроит на oi четках шкал регуляторов Параметр настройки Значении допустимых отклонений для регулятореи аппарат-кого типа приборного (встроенно-10) шпа Зона пропорциональ- ±0,15 ±0,20 ности на отметках шкал от 40 до 1000% время интегрирова- +0,20 +0,3 ния и время июдрома на отметках шкал от 0.5 до 50 мни Время предварения и ±0,20 ±0,30 время дифференцирования на о тетках шкал от 0,5 до 10 мин Прюерка параметров регуляторов Основную nof решность pei уляторов определяют сле.туютцнм образом: а) для регуляторов типа ПЗ-1 устанавливают зиачеиие задания и изменяют значение регулируемой величины до тех пор, пока значение выходно! о сигнала не изменится от нижнего до верхнею и от верхнего до нижнего предельного шачсння. При этом основную HOipeniHocTb проверяют при трех значениях ретулируемой величины или задания, равных 10, 50 и 90% нормирующею шачения входного сигнала, с отклонением ис более ±3%; б) для ре1у;гягороз типа ПЗ-2 устанавливаю! предельные значения зоны возврата и И1меняют регулируемую величину до гех пор, пока выходной сигнал не изменится от нижнего до верхнего и от верхнего до нижнего предельного значения, при этом отмечают значения pwyJmpyeMofl величины, при коюрых происходят указанные изменения выходного сигнала, Предельные значения юны возврата устанавливают на начальном, среднем и конечном значениях диапазона настройкн зоны B03Bpaia и значениях задания, равных 10, 50 и 90% нормирующего значения входного сигнала, с отклонением не более ±3%; в) для pet уляторов типов ПД-2 и ПД-3 проверку проводят при .минимальном значении ттостоянной времени предварения для значений регулируемой величины, равных 10, 5Р и 90% нормирующего значения входного сигнала, с отклонением не более ±3%; г) для регуляторов 1ИП0В П и ПД-1 проверку следует проводить по схеме, приведен-пой на рис 5.24, при установке переключателя в положение А. Регулятор проверяют прн минимальных значениях постоянных времени изодрома, интегрирования, предваре-ттия и диф(1)еренцировання, при зоне пронор-пиональности, равной 100% для заданных значений регулируемой величины, и значений выходного сигнала, равных 10, 50 и 90% нормирующего значения выходного сигнала, с отклонением не (iojTee ±3%, При Отсутствии точки 5 = 100% основную TIOT peiTiHocTb определяют для значения зоны пропорциональности, указанного в lex-нических условиях на регуляторы конкретных типов. Зону пропорциональносги проверяют при заданном значении задания, равном 50% нормируюндао значения входного сигнала, с отклонением не более ±3%, и MHHHMajTb- 1ЮМ значении времени предварения для регуляторов ПД и ПИД на всех числовых отметках шкалы зоны пропорционапьности. Выходной сигнал ретулятора при миии-мальном значении постоянной времени инте-т рирования или постоянной времеШ изодрома стабилизируют па значепни 50%, норми-руютцего значения выхолного сигнала, с отклонением не более ± 3 %, затем указа- 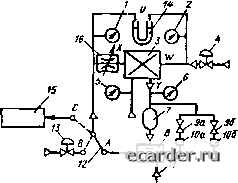 Рис. 5.24. Схема проверки pei уляторов типов П, ПД-1, ПД-2, ПД-3, ПИ и ПИД: i - манометр для контроля ттеременного значения регулируемой величины. 2 ~ манометр для контроля чадаиною значения регулируемой величины, 3 - регулятор, 4 - задатчт1к: 5 - манометр для коцгроля давления литания, 6 - показываю-тця или pei улнруюшнй манометр для контроля выходного давления, 7 - емкость, Я - реле суммирования или ПИ-зветто для испытаний регуляторов iHTTDB и и ПД, 9-вонтиль; 10 - устройство для измерении расхода; П - переменное смещение; 12 ~ переключатель; И - jaflaT4HK; 14 - манометр для контроля сигнала ошибки; 15 - генератор лииейио нарастающего сигнала; 16 - регулируемый иыевморез нстор 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 [68] 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |