
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 [81] 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 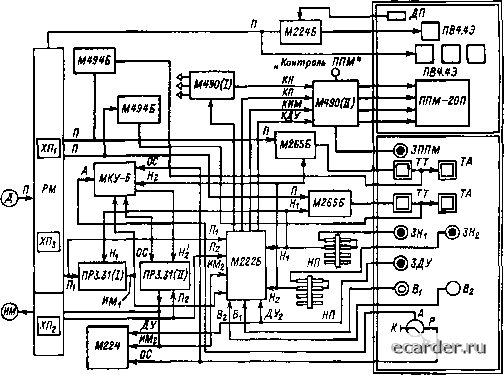 Рис. 5.57. Структурная схема установки «Режнм-1Д» для каскадной схемы регулирования «Номинал» и т. д.. а также исполнительные механизмы, вьпиночателн и т. п., т носянше- ся к регулятору ПР3.31(1), указаны с индексом 1 (Ui, Hj, ИМ, и 1.Л.), а к регулятору ПРЗ.З(11)-с индексом 2 (П. Н. ИМ и т. д.). в остальном схема на рнс. 5.57 не имеет суи1есгвениых отличий от схемы на рис. 5.56. Рассмотрим более подробно работу модулей каскадною управления МКУ-6, оперативного контроля регулируемых контуров и прибора ППМ-20П. Модуль каска/шого управления МКУ-б Модуль каскадною управ-шния МКУ-6 обеспечивает возможность эксплуатации каскадных схем в одном из следующих режимов работы: каскадном; олноконтур[ЮЙ стабилизации вспомогательной переменной; одноконтурной стабилизации главной переменной; одноконтурной Одновременной стабилизации обеих переменных. Функциональная схема модуля каскад-ного управления изображена иа рис. 5.58. Конкрешый режим работы модуля устанавливается оператором с помощью трехпозиционного переключателя /, рассложенного на мнемосхеме, и пневмо1умб;1еров 1]Т и ПТ2. вмонтированных в самом модуле. Каскадный режим работы. 1рехпози-ЦИ01ШЫЙ переключатель режимов 1 находится в 1Юложеннн «К» (Каскад). Контакты пневмотумблеров flTt н ПТ2 разомкнуты. Работают два регулятора. Выходной сигнал главного регулятора Pti (сигнал ИМ от Рг,) через реле Pj поступает на вход вспомогательного pei улятора Pj и является его заданием (си1 нал Нз к Pj). Режим одв№овтурйой стабнлнзацин вспо-мсиагельнои перемтвоЙ. Трехпозшщонный переключатель режимов / находится в поло-женин «А» (Авюмат). Контакты лневмо1ум-блеров ЯГ, и ПТ2 разомкнуты. За;анием для вспомогательного pei улятора является выходной сигнал задатчика номиналов ЗИ2 (си1на. Hj от задатчика). Режим одноконтурной стабилизации глав-нон переменной. Контакты пневмотумблера ПТ2 замкнуты. Его выходной сигнал через 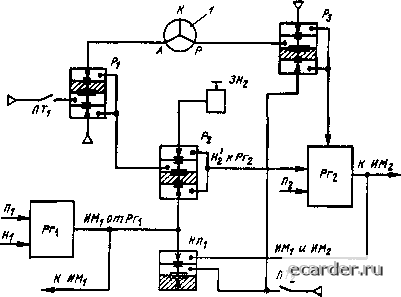 Рис, 5.58. Функциональная схема модуля каскадного управления МКУ-6 реле Рз отключает вспомогательный регулятор P?2. Главный регулятор Рг, работает. Его выходной сигнал через клапан Кяу поступает на исполнительный механизм (сигналы ИМ, и HMj)- Режим одноконгурной адновременвой стабилизации обеих переменных. Регулируются две независимые переменные (Я, и П-. Peiy-лировапие каждой из переменных осуществляется по одноконгурной схеме, при этом выходные сшналы регуляторов Р? и Рг идут на соответствующие исполнительные механизмы. В этом режиме тумблер ЯГ, включен, а ЯТ; выключен. Модуль оперативного коитроли регулируемых контуров М222Б Модуль предназначен для коммутации по вызову оператора сигналов параметра Я, номинала Я. исполнительного механизма ИМ, дистаиционного управления ДУ в со-ответствуюпще коллекторы КП, КИ, КИМ, КДУ и далее к показывающему прибору ППМ-20П. Модуль состоит из 20 клапанов типа ПЗК.1 (рис 5.59). Все клапаны можно объединить в четыре группы (по горизонталнХ каждая из которых содержит пять клапанов. На первую ipynny клапанов поступают сигналы параметров (/7) j - Я; па вторую-сигналы номиналов (Я) Hi~Hs: на третью - сигналы исполнительных механиз- мов {ИМ) ИМ - ИМ; на четвертую - сигналы лист анционного уп равлеиия (Д У) ДУ, - ДУ,. Выходы пяти клапанов первой группы объединены внутри модуля в коллектор параметров КИ, второй группы " в коллектор номиналов /СЯ; третьей группы - в коллектор исполнительных механизмов КИМ; четвертой - в коллектор ДИС1 анционного управления КДУ. В управляющие камеры этих клапанов поступают сигналы вызова В, - 5s- Для вызова какого-либо кон 1 ура регулирования на контро.ть оператор вставляет ключ вызова в гнез.го пиевмовызова, При Этом четыре нормально закрытых клапана контролируемою канала откроются и сигналы Я, И, ИМ, ДУпоступят в соответ-ст вующис колллекторы /С/7. /СЯ, КИМ, КДУ и далее - на показывающий прибор ППМ-20П. Прибор ноказываюший MHoroiniajnAbu ППМ-20П Прибор ППМ-20П предназначен для измерения и индикации по вызову оператора сигналов, характеризующих состояние регулируемою кон I ура (переменная П, номинал И, давление на исполнительном механизме в автоматическом режиме ИМ и в режиме дистанционного управления ДУ) или нерегу-    Рис, 5.59. Функциональная схема модуля оперативного контроля регулирующих контуров M2ZJE лируемой неременной. Индикадия сигналов П Vi. Н осушес1вляе1ея прибором иа абсолютной (физической) 1икале, сигналов ИМ и ДУ-на относительной (100%-пой) шкале. Прибор работает следующим образом. При вызове контура (или нерегулируемой переменной) на измерение и индикацию с [незда вызова контролируемой по1ици1). расположенного на мнемосхеме, пневматический сигнал условной 1 HoctynafiT на соответствующий дискретный пнсвмоэлекгро-преобраюнаель ПЭП (рнс. 5.60) и нреобра-зуе1ся н нем через выпрямитель В в дис-крсгныЙ сигнал постоянного напряжения. При этом размыкается цепь обму1ки реле KV через неподвижный конак1 злектричс-ского искателя эя предгпествуюгцей контролируемой позиции и полается иапряже1ше на соотве I с I вующии неподвижный коптак! элек грического искатепя ЭИ, вызванной на контроль позиции BbjI элек1ро.\вигагеля м, жестко связанный с подвижным контактом ЭИ и барабаном /, образующими которого являются абсолютные шкалы, управляется реле КУ, имеющим замыкагаший и размыкающий контакты Прн размыкании цепи обмотки реле /кУрашыкаюгпий контакт включает элек1родвигатель М, а замыкающий конзакг огк.1гючает тормозящий конденсатор С. Элекфоцвигатель М начинает врашать подвижный контакт искателя ЭИ и барабан I со шкалами. При достижении подвижным KOHiaKiOM искателя ЗИ неподвижного контакта контролируемой позиции цепь обмотки реле К К замыкается, размьгкаюпщй контакт размыкается, отключая электродвигатель М, а замкнувшийся при этом замьпсаю-ший контак! пропускает тормозящий импульс с конденсатора С на обмотки возбуждения 05, и ОБ; электродвигателя м. В результате этого барабан / со шкалами осганавливаеюя в laKOM положении, что вы-зваппая абсолю1ная шка,па становится против смотровой прорези 2, расположенной на лицевой сюроне прибора ППМ-20П. Одновременно с вызовом необходимой абсо-гютиой шкалы вызывной си1 нал с гнезда вызова поступает на модуль М222Б; в результате к измериельным входам (разъем 3) прибора ППМ-20П поступают сигналы я, И, ям. ДУ соответствующей позиции. Си -на,1Ы П а Н контролируются с помощью измерительных устройств ИУП и ИУИ сигналы ИМ и ДУ - i: помошью двухстрелоч-пого ManOMeipa м. Электрическое питание переменного напряжения 24 и 220 В подводится к прибору с помощью разъема 4. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 [81] 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |