
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 [94] 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121  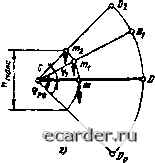
 Рис. 6.27, Виды кинематических схем РО же нелинейна, но в рабочем диапазоне ее нелинейность существенно меньше по сравнению с нелинейностью статической характеристики па рис. 6.27,6. На рис. 6,27, е представлена статическая характеристика кинематической свящ, показанной на рнс, 6,27, , в отиоситачьных еди- ницах при фРО макс = 90°. Прн фрог 120" статическая характеристика в относительных единицах практически совпадае! с характеристикой ч>ромакс = 90". Из сравнения статических характеристик на рис 6.27, в и е следует, что кинематическая схема рис. 6.27, ? допускает больший угол поворота РО фромакс и имеет при прочих равных уачовиях меньшую нелинейность. Два вида кинематической связи, приведенные на рис. 6.27, отличаются знаком отклонения нелинейности прн О < < ФРО /ФРО ма«с < 0,5 н при 0,5 < < фро/фгомакс< t, что следует учитывать при спрямлении нелинейных расходных характеристик РО. Необходимые расчеты кинематической схемы связи РО н ИМ Х1я получения требуемой зависимое!и между расходом и положением выходного устройства ИМ могут производиться как аналитически, так н графически, Во многих случаях необходимые сочленения ИМ и РО подбираются опытным путем. Связь ИМ с РО при П0М01ЦИ профильной шайбы дает возможность получать не-01Шпаковые соотношения перемещений вала и РО лля различных участков » изменять эти соотношения в довачьно широких пределах. Применение шайб определенного профиля позволяет получить исполнительное устройство с заданной характеристикой прн использовании стандартных ИМ и РО. Обипе требоаамяя к деталям и узлам для сочленения. Общим требованием, которое предъявляется к отдельным деталям и узлам, применяемым для сочленения ИМ с регулирующими органами, является необходимость обеспечения достаточной жесткости соединений и минимальных люфтов в кинематических парах. При зтом влияние на качество работы системы управления упругих дефор-мащш передаточных звеньев и зазоров в соединениях, вызывающих допачнитсльное запаздывание, должно быть сведено к минимуму. Даже небольшие люфты в шарнирах многозвенного соединения в сумме могут составить 5-10% общего перемещения регулирующего органа н внести таким образом в АСР значительную нелинейность. Для обеспечения нормальной работы ИМ необходимо руководствоваться монтажно-эксплуатационными инструкциями для данного типа ИМ, разработанными заводами - изготовителями этих механизмов. Особенности установки исполнительных механизм)», В общем случае электрические ИМ могут устанавливаться непосредстэенно на регулирующих органах, на полу, стенах, а также на разного рода конструкциях. Дли прямоходных и мкогооборотных механизмов нег ограничений по огноситсльному расположению их в пространстве. Однообо-ротные механизмы обычно должны устанавливаться так, чтобы их выходной ва.п был pacпoJЮжeн горизонтально с допустимым отклонением от горизонтали не более 15". Это Офаннченне объясняется применением жидких смазок в зубчатой передаче редуктора. Исполнительные механизмы, ycranaajm-ваемые не на РО {чаше одпооборотные), должны монтироваться на жестком основании таким образом, чтобы обеспечивались удобная их настройка и обслуживание, а также возможное уменьшение воздействия внешних факторов (механических ударов, высокой температуры, влаги, пыли и др.). Вместе с тем должна быть обеспечена простота сочленения ИМ с РО с возможным исключением длинных тяг и промежуточных опор. Соединительные тяги не должны вызывать осевых усилий иа выходном органе однообо-ротного механизма, а у прямоходных механизмов должна быть сведена к минимуму возможность возникновения боковых сил. При установке ИМ непосредсгвенно на РО следует учитывать возможность длительного воздействия на иМ со стороны РО таких факторов, как температура, ш1ажность, вибрация н т. 11,, по своему значению 6jm3-ких к значениям, предольно допустимым дтя нормальной эксплуатации механизма, или даже превышающих их. Для уменьшения влияния подобных воздействий в некоторых случаях необходимы защитные меры. Прн монтаже ИМ возможны следующие дефекты: значительные люфты в местах сочленения; несоотввтс1&ия [[аправлений вращения выходного вала и рычага Ю; недопустимо малый угол меж.чу рычагом механизма и тягой к этому рычагу (при углах, меньших 9°, возникает опасность заклинивания); несоответсгвие размеров рычагов механизма, РО и соединительных тяг. Пневматические ИМ, имеющие непосредственное сочленение с РО, желательно устанавливать в вертика.пьном положении. Недопустимо устанавливать ИМ на линии с агрессивной средой мембранной головкой вниз, так как, просачиваясь через сальники, среда может попасть в мембранный ИМ и разрупшть его. Мембранные ИМ конструируются таким образом, чтобы при изменении давления в рабочей полости в пределах стандартного диапазона (0,02-0,1 МПа) перемещение ИМ равнялось (с определенной точностью) значению его условного хода 5у. Значения условного перемещения приняты но ряду чисел: 4, 6, 10, 16, 25, 40, 60, 100 мм. Практически все конструкции мембран-но-пружинных ИМ позволяют корректировать значение предварительного сжатия пружины, г. е. в некоторых пределах изменять давление в рабочей полости, при котором начинается перемещение выходного элемента. Например, в мембранных пружинных проходных механизмах прямого действия (рис. 6.28) резьбовая часть втулки 5 имесЕ длину, обеспечивающую такой диапазон изменения предварительного натяга пружины, который позволяет устанавливать давление начала хода в пределах 0,01-0,04 МПа. В ненагруженных ИМ (перестановочное усилие равно нулю) изменения усилия, развиваемого мембраной, уравновешивается усилием упругости пружины. Ненагруженные ИМ обеспечивают линейную зависимость между изменением давления в рабочей полости и ходом. Точность этой зависимости определяйся постоянством эффективной плошади и жесткости пружины. Точностные характеристики ИМ определяются осповной статической приведенной по1решностью, вариацией хода штока и порогом чувствительности. Под основной статической приведенной погреилностью б мембранного пружишюго механизма понимается отношение наибольшей разности действительного 5дв и приведенного 5,фив ходов к значению условного к i/ч" 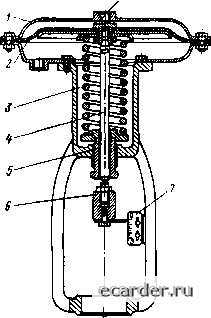 Рис. 6.28, Мембранный пружинный прямо-ходный механизм прямого действия 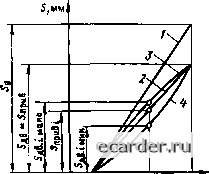 О 0,2 Pi р, МПа Рис. 6.29. Ходовые характеристики мембранных пружинных ИМ именьшего значения изменения командного сигнала, вызывающего начало перемещения, к диапазону командно) о сигнала. Перед пуском ИМ настраивают па заданный ход и командное давление воздуха; Р„вд = 0,02 ± 0,0025 МПа и Р = = 0,10 ±0,005 МПа. хода 5у, %: й = [(Яаг.-5пр„в)/5у]„-100. На рнс. 6.29 показаны ходовые характеристики S = f{P) мембранных пружинных ИМ. Прямая линия 1 являв!ся теоретической ходовой характерис г икой. Линии 3 и 4 соответствую! действительным ходовым характеристикам при прямом 3 и обратном 4 ходах. Зависимость 2 приведенного хода 5„рин От давления сжатого воздуха определяется графически соединением точек 5дво при Р = 0,02 МПа и 5jbI00 при Р = 0,1 МПа прямой линией. Прн конечном значении давления сжатого воздуха {Р = 100%) действительный ход равен приведенному Вш = = 5прив100 так же как и при начальном ходе 5лвО= SnpHBO. Максимальное значение действительного хода мри задан1]0м значении давления воздуха $дв, может быть больше или MeHbuie значения приведенного хода Sapmt "ри тех же условиях. Под вариацией хода понимается выра-жетюе в процентах отношение наибольшей разное]и значений хода, соотве1С1вующих одному и тому же значению командного сигнала при прямом н обрагном ходах к условному ходу. Порогом чувствительности называется выраженное в процентах отношение на- Командное давление воздуха подается непосредственно в головку / (рнс. 6.28) с мембраной 2 механизма (без подачи среды в клапан). Настройка размаха шкалы 7 перемешения производится изменением натяга пружины 3 ИМ, Если при изменении давления О! Рмин до Рмакс размах шкалы соответствует паспортному значению, но затвор РО полностью не закрывается или пе открывается, 10 следует изменить начальное положение затвора вращением муфты 6 на пттоке 4. После этого снимают ходовую характеристику при прямом и обратном хрдах РО. Вариа1щю, вы званную чрезмерно плот-шш набивкой сальников, можно уменьшить ослаблением уплотнения. В реальных ycjiOBHHX ИМ работает, преодолевая дейс! вие на подвижную систему не только усилия трения в подвижных соединениях, но также усилия статической и динамической неразгруженности за i вора. Таким образом, внешние уси.ия, действуя на подвижную систему, искажают ходовую харак-геристику мембранно-пружинных ИМ и вводят пелниейность и i истерезнс. Ширина петли 5цн j часе - лв I мнн (см, рнс. 6.29) часто доходит до 0,01-0,015 МПа. Кроме того, в конце хода мембранно-пружинный ИМ развивает небольшое перестановочное усилие. Это неудобно в тех слу- 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 [94] 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |