
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 [95] 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 чаях, когда именно в конце хода необходимо усидие для создания уплотннтельного контакта между запирающимися поверхностями затвора и седла. Для мембран но-пружинного ИМ характерны также низкие динамические свойства из-за большого объема рабочей полости. Улучшение характеристик мембранно-пружинного ИМ достигается применением позиционера. Позиционер работает как регулятор положения выходного элемента. Он формирует сигнал по положению выходного элемента и сравнивает его с командным сигналом. При этом вырабатывается сигнал рассогласования, который управляет подачей сжатого воздуха в рабочую полость. Применение позиционера улучшает динамические свойства снстемы управления, так как регулирующее устройство нагружается на небольшую приемную камеру позиционера. Кроме того, устраняются статическая погрешность и гистерезис ходовой характеристики, создаваемые за счет действия внешних сил на подвижную систему, С достаточной степенью точности можно считать, что нелинейность и гистерезис ИМ с позиционером равны аналогичным параметрам самого позиционера. Используя позиционеры, можно изменять диапазон входного давления, соответствующий полной перестановке РО. Поэтому, применяя позннно-нер, можно использовать ИМ, в которых полное перемещение происходит при давлении на мембрану, например. 0-0,2 МПа. Применение позиционеров позволяет строить схемы, в которых одно регу;шрую-щее устройство управляет двумя ИМ, причем один ИМ может работать, например, в диапазоне командного сигнала 0,02-0,06 МПа, второй - в диапазоне 0,06-0,1 МПа. 6.5. НАЛАДКА СХЕМ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ Электромагнитные итолшпельиые механизмы В АСР позиционного действия широкое применение в качестве исполнительного механизма получили электромагнитные приводы, преобразующие энергию электрического тока в поступательное движение РО. Такие приводы, представляющие собой пря-моходовой электромагнит с вытягивающимся якорем, называют также соленоидами. В настоящее время наибольшее распространение получили электромагнитные при- воды серии ЭВ, предназначенные для управления различными клапанами, вентилями, задвижками. Электромагнитные приводы серии ЭВ по принципу действия можно разделить на две группы; 1) электромагнитные приводы ЭВ-1 и ЭВ-2, рассчитанные на длительное обтекание их катушек током. При подаче напряжения на катушку электромагнита его якорь втягивается, открывая вентиль. К недостаткам электромагнитных приводов этой группы следует отнести постоянное потребление электрической энергии прн открытом положении РО и возможность произвольного переключения РО при исчезновении напряжения. Электромагнитные приводы типов ЭВ-1 и ЭВ-2 в зависимости от исполнения могут работать от сети постоянного тока напряжением 110 и 220 В и от сети переменного тока напряжением 127, 220 и 380 В; 2) электромагнитные приводы тнпа ЭВ-3, рассчитанные на кратковременный режим работы. Они состоят из двух электромагнитов, заключенных в одни корпус; главного, служащего для открытия РО, и электромагнита защелки, являющегося приводом механической зашелки, удерживающей РО в открытом положении. Катушки обоих электромагнитов находятся под током только в момент переключения РО. При подаче питания на катушку главного электромагнита его якорь вытягивается, РО открывается и удерживается в открытом положении защелкой, что даст возможность по достижении РО положения полного открытия разрывать цепь питания катушки главного электромагнита с помошью конечного выключателя. Для закрытия РО следует подать питание на катушку электрома! нита защелки, который, сработав, уберег зан1елку, освободив РО; последний под действием собственной массы [ЮДВНЖ1ЮЙ снстемы или возвратной пружины закроется и с помощью конечных выключателей отключит электро-магни! защелки. Катушки главного электромагнита и электромагнита защелки привода ЭВ-3 состоят из двух секций, рассчитанных на питание от сети постоянного тока напряжением НО В, а при последовательном соединении - 220 В. При работе от сети переменного тока в цепи питания привода включают выпрямители. При наладке электромагнитного привода с защелкой контакты конечного выключателя, включенные в цепь питания главного электромагнита, настраивают так, чтобы они размыкались за 3 - 4 мм до окончания полного хода якоря электромагнита при открытии вентиля. При этом оставшиеся 3-4 мм якорь движется только по инерции. В некоторых случаях (например, при вязких средах) этой инерции оказывается недостаточно для того, чтобы якорь прошел вверх оставшиеся 3 - 4 мм и встал на затцелку. Тогда под действием возвратной пружины якорь, а вместе с ним и шток вентиля начнут опускаться вниз; конечный выключатель, расположенный в лепи питания катушки главного электрома! нита, снова замкнется, катушка получит питание и электромагнит снова начнет Втягиваться вверх. Этот процесс может многократно повторяться до тех пор, пока нажата кнопка управления. При автоматическом управлении вентилем, когда вместо кнопки используют контакты пускового устройства, замкнутые на длительное время, подобная пульсация якоря может Привести к выходу электрома! HHia из строя. Для устранения явления пульсации якоря в схемах управления электромагнитными приводами с зашелкой предусматривают одну из следующих мер: 1) параллельно контактам конечного выключателя в цепь питания кату1ики главного электромагнита включают шунтируго-шее сопротивление, которое должно быть подобрано экспериментально в процессе наладки электропривода. Ориентировочно для цепи питания катушки электромагнита постоянным током напряжением 220 В шунтирующее сопротивление должно составлять 500-1000 Ом, 2) наиболее надежный способ устранения пульсации якоря электромагнитного привода с зашелкой состоит во включении в схему управления приводом реле времени, которое увеличило бы время питания током кат ушки главно! о электромагнита после переключения блокировочных контактов привода еще на несколько десятых долей секунды. На рис. 6.30 показана схема позиционного авгоматического регулирования с использованием выпрямителя VD с электромаг-нигнымк приводом и зашелкой. Трехнози-ционныи регулирующий прибор в зависимости от действите.тьного значения регулируемого параметра дает команды на открытие нли закрытие соленоидного вентиля. При замыкании контакта Sm («Меньше») через выпрямитель VD и блокировочный контакт /Fвключается реле времени КТ, которое контактом КТ замыкает цепь питания от выпрямителя катуп1ек главного (тяювого) электромагнита YA. При этом якорь итвно-го электромагнита, жестко связанный со штоком вентиля, перемещается и вентиль открывается. Однако размыкающиеся с замедлением контакты реле времени КТ разрываю! цепь питания катушки главного электромагнита только через некоторое время (около 1 с). С одной стороны, этого замедления вполне достаточно, чтобы привод в открытом положении вентиля всзал на защелку, а с другой стороны, такое замедление, безусловно, не может привести к перегреву катушек главного электромагнита. Подобное включение в схему управления вентилем с электромагнитной защелкой реле времени является надежным способом устранения явления пульсации якоря. 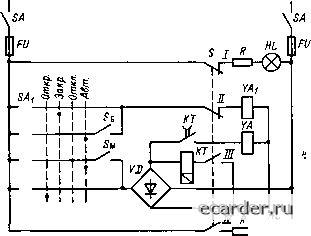 Диаграмма работы контактов р9гутрующчго npuSopa Пределы измерения Зона Меньше Зона „Норма" Зона „Больше " Рис. 6.30. Принципиальная электрическая схема позиционного регулирования с помощью соленоидного вентиля При замыкании контакта 5б («Больше») регулирующего устройства через блокировочный контакт и получает питание катушка электромагнитной зашелки YA, v. вентиль закрывается. В электромагнитах УЛ при необходимости проверяют правильность соединения обеих катушек и полярность. При правильном соединении ток в обеих катушках (секциях) протекает от конца секции к началу, что обеспечивает согласное действие магнитных потоков обеих секций. Если соединение неправиггьное, то в одной секции ток протекает от конца к началу, а в другой - от начала к концу. В этом случае сопротивление катушки и ее ток будут нормальны, а магнитные потоки направлены в разные стороны. Суммарный магнитный поток близок к нулевому значению, и электромагнит работать не будет. Определение полярности обмоток. Полярность опредедяЮЕ по схеме, приведенной на рнс. 6.31, следующим образом. Концы секций произвольно размечают бирками с номерами 1-4. Секции соединяют последовательно по схеме рис. 6.31, а или по схеме рнс. 6.31,6. Схему включают в сеть переменного тока напряжением 12 В. Прн одинаковой полярности обмоток нх магнитные потоки складываются, индуктивное сопротивление велико - лампа горит слабо. При противоположной полярности обмоток магнитные потоки направлены встречно, взаимно компенсируются, индуктивное сопротивление мало - лампа горит ярко. Определение электрических характеристик привода производят после измерения сопротивления и испытания изоляции. Прн этом определяют напряжение и ток срабатывания. Основным требованием к электромагнитным приводам является обеспечение качественной работы прн напряжении низания, сниженном до 70%. Опробование. С целью заключительной проверки надежности действия ИМ производится его опробование. Испытания желательно проводить на остановленном оборудовании при 1ЮЛН0М давлении рабочей среды. Опробование заключается в многократных включениях и отключениях ИМ. Оно производится при 80%-ном напряжении. При опробовании устанавливают четкость срабатывания ИМ, надежность работы контактов коммутапионной аппаратуры, отсутствие перенапряжений и дуги между контактами. Наиболее вероятно появление перенапряжений при отключении катушек электромагнитов постоянного тока. Наиболее простым способом уменьшения перенапряжения является установка параллельно катушке разрядного сопротивления Краз- После гашения дуги контактором под действием наведенной ЭДС через катушку и сопротивление протекает ток, который сравнительно быстро уменьшается. Чем больше значение Краз. тем больше перенапряжение. Для снижения перенапряжения необходимо уменьшить Краз- Однако при этом увеличивается общий ток через контакты контактора. В связи с этим обычно рекомендуют выбирать сопротивление i?pa3 примерно в 10 раз больше сопротивления катушки. Для уменьшения тока через сопротивление Лраэ при включенном контакторе последовательно с i?pa3 рекомендуется включать днод во встречном направлении относительно напряжения питания, С учетом того, что ток через Л раз быстро снижается, его мощность рассеяния выбирают равной 2% номинальной мощности катушки. Многооборотные иаюлнительные механизмы Для управления многооборотными запорными и регулирующими органами наиболее широкое применение получили ИМ, состоящие из электродвигателя, понижающего число оборотов механического редуктора и ряда дополнительных узлов. Прн дистанционном илн автоматическом управлении запорными регулирующими органами весьма существенно обеспечить своевременную остановку электропривода 12 В О- 128 О- Рис. 6.31. Схема проверки полярности соединения обмоток электромагнитов 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 [95] 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |