
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 [96] 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 при достижении рабочим органом полного открытия или закрытия. Для этой цели все ИМ типов М, А - Д снабжены конечными (путевыми) выключателями, от действия которых в значительной мере зависят надежность в безаварийность работы запорной ар матуры. В ИМ ТИПОВ М, А конечные выключатели встроены в корпус электропривода В ИМ типов Б - Д конечные выключатели размещаются в специальной коробке конечных включателей типа УКВ-4 или ВП-4. В зависимости от числа оборотов шпинделя, необходимого для полного закрытия или открытия запорно! о органа, суще- . ствует несколько вариантов исполнения коробок конечных выключателей. Они отличаются передаточными числами миниатюрного редуктора, встроенного в коробку. Коробки конечных выключателей типа УКВ-4 или ВП-4 содержат по четыре микро-переключа! едя типа МП-1, которые с помощью четырех кулачков, сидящих на общем валике, могут срабатывать в требуемых положениях запорного органа. Это обеспечивается соответствующей установкой рабочих кулачков прн наладке ИМ. Такая конструкция позвачяет ncnoiib ювать микропереключатели не только для отключения ИМ в крайних положениях рабочего органа, но н для сигнализации любого промежуточного или конечного положения, а также при необходимости осуществления блокировки данного запорного органа с другими агрегатами. Для дисганционной передачи положения запорио!0 ор!ана коробка конечных выключателей может быть дополнена сельснном-латчиком типа БД-404А, работающим с сельсииом-прнемннком ти!1а БС-404А, устанавливаемым на щите управления, с которого производится дистанционное управление запорными органами. Электроприводы типа М для дистан-цнонной передачи положения рабочего органа вместо сельсинного устройства снабжены потенциометрнческим датчиком. Сопротн-вленне потенциометра (100 + 2,5) Ом, напряжение питания - ие более 12 В. По способу эанщты ИМ от поломки (при заедании шпинделя, отказе конечного выключателя или попадании в запорный орган постороннего предметах а также по способу обеспечения необходимее плотности закрытия запорных органов ИМ типов М, А - Д делятся на приводы с электрическим реле максимального тока и с электромеханической муфтой крутящею момента. Помимо защиты ИМ муфта предельного крутящего момента или электрическое реле максимального тока могут быть использованы ;и1я принудительного уш!Отнения запорных органов там, 1 де это диктуется технологическими требованиями, В ЭТИХ случаях остановка электродвигателя при закрытии производится не конечными выключателями, а контактами муфты крутящего момента или токового реле, что обеспечивает иеобходшлую алогность закрытия запорного органа при небольших силовых перегрузках. При наличии в силовых цепях, питающих электродвигатель ИМ, автшатйческого выключателя защита электродвигателя от перетрузок при заклинивании запорною органа в промежуточном положении может осуществляться за счет действия тепловых расдспителей самого выключателя. Исполнительные механизмы типа МЭМ нмеют конечные выключатели, выключатели муфты предельно! о крутя1цего момента, датчики обра1ной связи по положению выходного вала и узел питания дистанционного указателя положения. В качестве датчиков обратной связи по положению выходною вала в исполнительных механизмах МЭМ-0,63 и МЭМ-1,6 применены индукционные плунжерные датчики с напряжением питания 12 В, в механизмах МЭМ-4, МЭМ-10 и МЭМ-25 - реостатные датчики с активным сопротивлением 120+10 Ом. OcHcmibie технические требоваия к схемам увравлешш. Электрические схемы управления многооборотиыми ИМ в общем случае должны удовлетворять следующим основным техническим требованиям- 1) схемы должны иметь защиту от перегрузок н коротких замыканий в силовых цепях электропривода, а также в цепях управления и сигналнзатщи. При выполнении схем управления и сигналнзацнн катушки матитных пускателей должны присоединяться к ну.чевому проводу. Такое построение схем предотвращает их ложную работу !1ри появлении «земли» в цепях управления; 2) схема управления должна исключать возможность одновременной подачн командных импульсов от устройств дистанционного и автоматического управления, а также возможность подачи питания на одну из катушек реверсивного магнитною пускателя при обтекании током второй катушки; 3) схемы управления из двух н более мест должны быть построены таким образом, чтобы была исключена возможность одновремеииого управления одним устройством из разных пункте»; 4) желательно, чтобы схема управления обеспечивала возможность остановки ИМ в любом промежуточном положении, а также возможность посылки команды как на открытие, так и иа закрытие. Указанное ус-ловт обеспечивает прекращение (Япибочно начатой операиди и возврат в исходное состояние, а также постепенное открытие или закрытие ИМ с непродолжительными остановками в промежуточных положениях, если это требуется по условиям технологического процесса; 5) нормально остановка ИМ в положении полного открытия нлн закрытия должна осуществляться с помощью конечных выключателей, разрывающих цепь питания соответствующей катушки реверсивного маг-HHTHOTo пускателя. Еспи запорные устройства требуют принудительного уплотнения при закрытии, остановка ИМ должна осуществляться, как указывалось выше, с помощью контактного устройства муфты предельного момента или токового реле; 6) схема управления запорным органом должна обеспечивать возможтюсть как дистанционного управления со щита или с места, так и автоматического управления по команде от устройства регулирования или блокировки; 7) схема управления регулирующим устройством должна обеспечивать движение последнего только во время действия импульса дистанционного или автоматического управления. На рис. 6.32 показана схема дистанционного управления ИМ запорного устройства без принудительного уплотнения при закрытии. Исполнигельный механизм имеет одно-стороиюою Муфту npeflenbHCeo крутящего момента. Подобные схемы обычно приме- няют для управления ИМ запорных задвижек, к которым не предъявляют специальных требований по обеспечению высокой плотности закрытия. В момент гюдачи командного импульса от кнопок дистанциоииого управления SBj или SBj подается питание на соответствующую катушку КМу и KMj реверсивного магнитного пускателя. Пускатель срабатывает и осгается включенным через собственный бJЮкнpoвoчный контакт КМ илн КМ 2 и контакты конечного выключателя SQj (КВО) или SQ2 (КВЗ). Прн досзижении запорным органом положения полного открытия или закрытия соответствующий конечный выключатель разрывает цепь питания катушки пускателя и привод останавливается. Для предотвращения одновременного включения обеих катугнек магнитного пускателя помимо механической блокировки, которой снабжен пускатель, в схеме предусмотрена электрическая блокировка с помощью размыкающих контактов КМ или КМ. При случайном заклинивании запорного органа в промежуточном положении отключение электродвигателя осуществляется контактами муфты крутящего момента [на схеме показан контакт SQ (КВМЗ) односторонней муфты крутящего момента, действующий прн дБнженнн запорного органа в сторону закрытия]. Кнопка SBj предназначена для остановки запорного органа в промежуточном положении при отмене действия ошибочно поданной команды. Использование кнопки SB 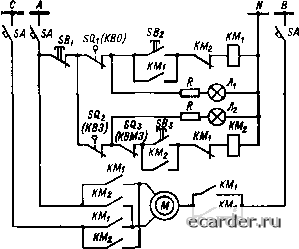 Диаграмма раБоты конечных выхлючатвйвй Ч-5 4~S 7-8 1-9 Закр 10-11 Шт 11-12 Откр Рис 6.32. Схема дисташщонного управления ИМ запорного органа без принудительного уплогненил при закрытии для остановки ИМ в промежуточном положении на длительное время обычно не допускается по техническим условиям на запорные органы. Сигнальные лампы и л2 обеспечивают сигнализацию соответственно закрытого и открытого положений запорного органа. В промежуточном положеннн одновременно юрят две лампы, сигнализируя о перемещении запорною органа, но не указывая направления движения, На рис. 6.33 приведена та же схема управления ИМ запорного органа, но с принудительным уплотнением при закрытии. Такие схемы широко применяют для дисшнцион-ного управления запорными вентилями, требующими принудительного «дожатия» при закрытии. В этой схеме размыкание в цепи питания катушки пускателя KMj прн закрытии производится не контактами конечного выключателя, а контактами SQ {КВМЗ) муфты крутящего момента. Прн подаче импульса на закрытие пускатель км2 получает питание через собственный контакт и параллельно включенные контакты конечного выключателя S63 {КВЗ) 7 -S н муфты крутящего момента SQ {КВМЗ) 1-2. Перед полным закрытием запорного органа размыкаются контакты {КВЗ) 7 - 8. Катушка пускателя КМ2 при этом остаётся включенной через контакты S04 (КВМЗ). При достижении необходимой плотности закрытия запорното органа момент сопротивления на валу становится больше предельного крутящв! о момента муфты, муфта срабатывает и кратковременно размыкает контакт SQ {КВМЗ) 1-2. Цепь катушки пускателя KMj при этом размыкается и ИМ останавливается. Контакты конечного выключателя SQ {КВЗ) 7-8 включены параллельно контактам 54 (КВМЗ) 1-2, чтобы избежать остановки ИМ в промежуючном положении прн случайных заеданиях запорною opi ана. Отключение электродвигателя при заклинивании запорного органа в промежуточном положении осуществляется тепловым расцепит едем автоматического выключателя SA, установленного в силовых цепях электродвигателя. Для предотвращения оптибоч-ной подачи команды на закрытие уже полностью закрытого запорного органа, что может привести к ею поломке, в цепь подачн импульса на закрытие включены контакты конечного выключателя SQ (КВЗ) 10-12. Схемы управления запорными органами, в которых тля принудительного уплотнения при закрытии вместо муфты предельного момента используется реле максимального тока, строятся аналогично, только вместо контактов 5Й4 {КВМЗ) муфты устанавливаются размыкающие контакты токового реле. Этн контакты размыкают цепь питания катушки пускателя КМ при значении тока, протекающего через электродвигатель, вьппе номинально! о. В схемах автоматического управления для исключения срабатывания реле максн-мапьного тока прн пуске электродвигателя необходимо вводить дополнительные реле (в С А Н В  КМг п SQ.2(KB3) TF-j KM- 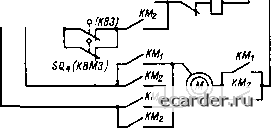 Диаграмма работы конечных выключателей.
Рис. 6.33. Схема дистантщонного управления ИМ запорного органа с принудительным уплотнением при закрытии 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 [96] 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||