
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 [12] 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 https://www.avito.ru купить эвакуатор. псльзователю обеспечить доступ к необходимой на каждом уровне управления информации, защиту от несанкционированного ша ошибочного ввода данных, технологическую сигнализацию, выдачу информации ПС запросу оператора или по инициативе системы в цифровой или графической форме на черцо-белые или цветные видеотерминалы и регистрацию этой информации. От диалоговой подсистемы в значительней степени зависит, «приживется» ли данная АСУ ТП. Очень важны формы представления иь формации, простота ее понимания, возможность идти от «общего к частному», т.е. получение общего представления о сосгояггаи процесса и возможность выявления состояния каждого аппарата или параметра. Если технологу для вызова таблицы интересующих его параметров приходится осуществлять более двух-трех нажатий на клавиши дисплея, запоминание которых затруднено, то это уже является предпосылкой для корректировки диалоговой подсистемы. Особенно четко должна быть налажена р£ бота диалоговой подсистемы в режимах передачи управления объектом на УВК и обратно, при этом должны быть обеспечены бестолчковые переходы при включении или отключении отдельных подсистем, задач и групп параметров, четкость представления информации при аварийной ситуации и отказе устройств вычислительного комплекса. Диалоговая подсистема должна предоставлять возможность контролировать работу всех программ, диагностировать и устранять неисправности, включать и отключать отдельные задачи, корректировать П1 раметры настройки pei уляторов, per ла-мснтныс и аварийные границы параметров, шращивать систему, включая новые задачи бе 3 изменения (желательно и без отключения ш время наладки) уже работающих подсистем и задач. Последнее требование является одним из важнейших при оценке пригодности р.зработанного проекта к наладке и внедрению, так как на практике включить весь набор запроектированных задач при пуске объекта не удается При наладке диалоговой подсистемы необходимо обратить внимание иа удобное для оператора-технолога распределение па-pt метров но группам, обеспечение требуемой скорости вызова, распределение информации пользователям (на дисплей диспетчера или начальника цеха выводятся укрупненные дан-Ш.1С, оператору - более детальные и т.п.). Большое значение имеет правильная настройка узлов зашиты от случайных ошибок отгератора и от несанкционированного ввода данных (например, оператор-технолог не должен изменять параметры динамической настройки регуляторов или регламентные 1раницы параметров), случайной «игры» с клавиатурой видеотерминала. Подсистемы вывода сообщений и выдачи управляющих воздействий обеспечивают своевременную выдачу информации или хранение ее в случае перегрузки УВВ. Недопустима потеря части информации из-за недостаточного быстродействия печатающих устройств или их отказа. Недопустима также выдача ошибочных управляющих воздействий при отказах устройств или сбоях в ВК. Эти подсистемы обеспечивают живучесть системы в целом и строятся таким образом, что устройства вывода информации реализуются в цепи дублирования, резервирования и замещения. Например, при отказе устройства быстрой печати (УБП) информация начнет выводиться на устройство регистрации, например зиакосинтезируюшее, и т. п. При распределении памяти для этих задач должна быть обеспечена достаточная емкость буфера сообщений, чтобы буфер не переполнялся при большом потоке сообщений, например в аварийной ситуации. Подсистема выдачи управляющих воздействий должна обеспечивать не только передачу и преобразование цифроаналоговой информации по заданному адресу, но и бестолчковые переходы при включении и отключении отдельных контуров и защищать объект от ложных управляющих сигналов. Такая зашита реализуется как программно, так и аппаратурно. Например, при управлении от УВК пневматическим исполнительным механизмом 8 системе непосредственного цифрового управления (НЦУ) может быть применен пневматический (на элементах УСЭППА) блок ограничения по скорости выдачи управляющего сигнала (реализованный как ограничитель за такт выдачи). В этом случае даже при полном отказе УВК (или при отключении напряжения питания установки) пневмосигнал, больший допустимого, на исполнительный механизм не пройдет, так как имеются пневматические емкости (ресиверы), обеспечивающие работоспособность пневматических систем на время, достаточное для устранения аварийной ситуации или перехода иа ручное управление Подсистемы организации и доступа к базе данных, лиспетчеризаини задач. Организация базы данных определяет такие важные показатели системы, как быстродействие (особенно для систем с внешней памятью), объем задач при ограниченных ресурсах оперативной памяти и т.д. Реализуемые АСУ ТП задачи классифицируются по быстродействию и значимости, и им присваиваются определенные приоритеты. Если во время выполнения решения ка-кой-.чибо задачи появится запрос от более приоритетной задачи, происходит прерывание в решении прежней задачи, к которому диспетчер или сама система возвращается после выполнения более приоритетных операций Такое весьма упрощенное представление о диспетчеризации задач позволяет понять, что при неудовлетворительной ортанизации базы данных и достаточно затруженной системе некоторые менее приоритетные функции могут выполняться нерегулярно или не выполняться вообше. Стремятся так организовать базу данных, чтобы все необходимые для решения этой задачи данные Можно было получить за одно обращение к устройству (например, дисковой памяти) с минимальной потерей времени или по определенному адресу оперативной памяти. Расстановка приоритетов, выполняемая при генерации и наладке системы, очень важна. Например, высокий приоритет присваивается задачам аварийной сигнализации, системам НЦУ и ППИ и подсистемам диалога, чтобы оператор не был вынужден ждать ответа на запрос более 2 - 3 с. что иногда случается на практике. Меньшие приоритеты присваиваются задачам выдачи режимного листа, расчета материального баланса и технико-экономических показателей, вычисления косвенных параметров по модели, оптимизационным задачам и т. п Ддя большинства информационных систем не следует слишком часто проводить опрос всех параметров, так как эта задача Имеет достаточно высокий приоритет и при большом объеме информации занимает много машинного времени. Обычно все параметры по частоте опроса разбиваются иа группы, наиболее часто опрашиваются ответственные и быстроиз-мепяющиеся параметры, например датчики расхода (примерно каждые 3 с), реже - системы измерения давления и уровня (через 6 с), еще реже - системы контроля температуры (примерно каждые 15 с), и совсем редко - системы измерения физико-хнмнческих величин и параметров ручного ввода (например, лабораторного анализа - один раз в минуту). Сервисные подсистемы должны обеспечивать тестирование устройств УВК, модулей и каналов УСО; проверку программного обеспечения по контрольным примерам и задачам; подютов-ку, загрузку, трансляцию, редактирование, 1енерацию и отладку системы; возможность модификации программного обеспечения при улучшении характеристик системы или при ее тиражировании. При пусконаладочных работах сервисные подсистемы имеют очень большое значение, так как они определяют наладкопригод-ность системы, позволяют значительно ускорить процесс отладки, локализации ошибок как в программах, так и в устройствах. Необходимо отметить, что даже в АСУ ТП средней мощности (несколько сотен входных сигналов) процесс отладки системы на объекте чрезвычайно сложен и важен. При ненормальной работе системы прежде всего возникает вопрос: где произошло нарушение - в аппаратуре или в программе? С помощью стандартных тестов и контрольных задач выявляется общая работоспособность технических средств. Однако некоторые аппаратурные неполадки выявляются только при работе всей АСУ ТП Вместе с тем программные средства также проверяются неполностью. Известны случаи, когда выявлялись ошибки в пакетах многократно тиражируемых программ Прн этом речь идет не об ошибках, вызванных размножением программ, а о непроверенных ветвях алгоритмов, работающих в редких ситуациях. Особенно трудоемко выявление таких редко повторяющихся ошибок в системах реального времени, когда неисправность может возникать один раз в сутки или даже реже; проанализировать причины ее появления чрезвычайно сложно. Как правило, нусконаладочные организации учитывают важность этих подсистем и не ограничиваются использованием стандартных подсистем, а постоянно их развивают и совершенствуют. В частности, большой модернизации подвергаются программы-отладчики, которые используются в режиме реального времени н включаются как подсистема отладки в пакет при генерации программного обеспечения. Раздел 3 НАЛАДКА ВТОРИЧНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ И УСТРОЙСТВ С УНИФИЦИРОВАННЫМИ входными СИГНАЛАМИ 3 1. ПНЕВМАТИЧЕСКИЕ ПРИБОРЫ Пневматические в юричпые приборы i ииа ПВ с унифицированным входным сигналом в д.1апа1оне 20-100 кПа ин 01авливаются одно- двух- и трехканальпыми. Принципиальная схема однокачального вторичного прибора предс[авлена на рис. 3.1. Действие прибора основано на компен-caiuiohhom методе измерения, при котором усилие на приемном элементе, возникающее от у[зменепш входного давления fN. уравновешивается усилием пружины обратной связи, нагяжепие которой определяет положение указателя прибора. Сжатый воздух от исючника питания через носюянный дроссель / подается к coniy 5 и силовому элементу /0. При изменении контролируемого параметра ffl. Приемный сильфон 3, перемещая рьсаг 4, изменяет зазор между недодвиж-ным соплом 5 и заслонкой б, закрепленной на конце рычага 4 Если заслонка прикрывает сопло, давление в линии на силовой элемент увеличивается, мембрана выгибается, отводя рычаг 8, к концу которо!о прикреплена лавсановая нигь !4. Перемещение нити через ролики 11 и 13 вызывает растяжение пружины обратной связи 7, соединенной с нижним конном рычага 4. При увеличении чначения контролируемого параметра рычаг 8 перемещается вправо, пить, растят ивая пружину, тянег вверх закрепленный на ней указатель параметра /2, пружина 7 отводит рычат" 4 и заслонку 6 от сопла 5 почти в исходное положение. Таким образом, усилие, развиваемое приемным сильфоном 3, компенсируется усилием пружины обратной свя1и 7, определяющей ход указателя 12. При уменьшении входного сигнала Рд верхний конец рычат а 8 перемещается влево и указатель опускается. Рычаги 4 и 8 креттятся к кронштейнам ттри ттомощи пластинчатых пружин 2 и 9. Так как прибор предназначен для ре-гистраттии унифицированного пневматического сигнала в диапазоне от 20 до 100 тсПа, в нем предусмотрены корректор нуля и узел ретулировки диапазона шкалы прибора. Ну-jreeoe значение указателя, соответствующее значению пневмосигнала 20 кПа, устанавливается выведенным на лицевую панель корректором нуля, воздействуюпшм на начальное натяжение нити через промежуточный ролик и. Конечное значение указателя, соответствующее матссимальному значению ттневмосигнала (100 кПа), ттастраивается изменением числа витков пружины обратной связи 7. При пом изменяется жесткость 73 7* 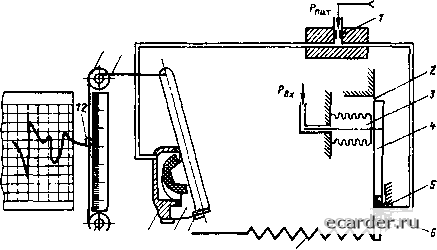 11 т Э 8 7 Рис. 3.1. Принципиальная схема вторичного пневматическою гфибора 0 1 2 3 4 5 6 7 8 9 10 11 [12] 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 |