
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 [8] 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 Рис. 2.1. Структура системы передачи, о!обра-жения и преобразовании измерительной информации Объект - Прео5ра 3 о ват ель измерительный
Используются следующие пределы изменения электрических унифицированных сигналов передачи информации: 0-10 мВ - сигнал напряжения переменного тока при изменении взаимной индуктивности (дифференциально-трансформаторная сист ема); 0 - 5; 0 - 20; 4 - 20 мА - сигналы постоян-1ЮГЗ тока (токовая система передачи ин( ормации) В современных приборах ГСП наибольшее распространение получили токовая и пневматическая системы передачи информации вследствие простоты реализации систем, высокой помехоустойчивости, взаимозаме-няемосги узлов и высокой степени ремонто-прнгодносги аппаратуры. О гметим, что в системах технологического контроля довольно широко приме-пян)тся неунифицировашше. так называемые естественные, электрические сигналы от термозлекгрических преобразователей (термопар) и термо преобразователей сопротивления (термометров сопротивления), которые мо[ ут передаваться на значительные (до нескольких сотен метров) расстояния. Применение определенной унифицированной системы сигналов на объекте наладки не исключает возможности использования там, где это удобно, и другой системы преобразования сигналов. Например, достаточно широко Используются электропневмо- и пне вмоэлектропреобразователи аналогового юкового сигнала. В частности, при использовании пневматической системы передачи ввод информации в УВК осуществляет ся через пнсвмо-электропреобразователь p/i, а управление пневматическим исполнительным механизмом при токовой системе производи гея через электрон невмопреобразователь ijp Показывиющий и регистрирующий диалоговый, прибор Устройства позиционного контроля сигнализации и защиты Функциональные и регулирующие устройства. Информационно -вычислительный комплекс или электронневмопознционер, устанавливаемый на иc[lOJШИтeльпoм механизме. В агрегатированных комплексах и УСО ВК обычно применяются сигналы напряжения постоянного тока 0-5, -10- +10, 0 - 2 В, а также система передачи информации в виде двоичною кода, обычно )0-разрядного. В промышленности имеют ограниченное применение также часто!пая и ферродинами-чсская системы передачи на переменном токе. Иногда практикуется использование реостатных и сельсинных ттреобразователей 2.2. ПНЕВМАТИЧЕСКАЯ СИСТЕМА ПЕРЕДАЧИ Основным элементом в промышленной пневмоавтоматике является преобразователь типа «сопло - заслонкам, преобразующий перемещение заслонки в изменение пневматического сигнала (рис 2.2. а). Сжатый воздух с постоянным давлением Pi от источника питания через постоянный дроссель / поступает в проточную камеру 2, из которой выходит в а т мосферу через сопло i, управляемое заслонкой 4. Проточная камера 2 линией связи 5 соединена с прибором 6, регистрирующим выходной сит нал преобразователя. При перемещении заслонки в пределах 0,02 - 0,05 мм ттод действием параметра х давление Pj изменяется от О до 100 кПа. Однако характеристика P2=f{x) является нелинейной. Для получения линейной зависимости ттрименяется компенсационный метод преобразования сигнала перемещения или усилия в пропорциональный ему пневмосигнал. 3 4-5- 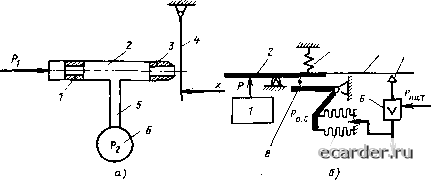 Выходной, сигнал Рис. 2 2. Пневматическая система передачи: а - пневмопреобразовагель типа «сопло - заслонка»: б - пиевмоснловой преобразователь Схема пневмосилового преобразователя показана на рис. 2.2, б Контролируемый параметр в измерительном блоке 1 преобразуется в усилие р, которое через рычажную сис тему 2 уравновешивается усилием f„ „ развиваемым сильфоном обратной связи 7. При изменении измеряемого параметра происходит пебольпюе перемещение рычажной системы и связанной с пей засиюнки 4 относительно сопла 5 Эю перемещение преобразуется в усилителе б в выходнор1 пневмо-сигнал, который подается 1акже в сильфон обратной связи для компенса1ши выходного усилия. Таким образом, мерой измеряемого усилия f является текущее значение выходного сигнала. Унифицированный пневмоси-ловой преобразователь встраивается в датчики давлгения, перепада, уровня и т. д, обеспечивая преобразование измеряемо! о параметра в про!юрциональиый пневмосиг-нал, изменяю)!шйся в диапазоне 20-100 кПа. При предмонтажной проверке датчиков с 1!невматической системой передачи регулирование «нуля» системы н не вмо передачи производится натяжением пружины 3, воздействующей на рычажную систему, размах - перемещением ролика S вдоль параллтельных рычагов рычажной системы 2. Автономная нш!а,дка пневматических систем передачи информации заключается в проверке адресности, отсутствии утечек или закупорки пневматических линий связи, проверке соответствия показаний первичных и вторичных приборов. Автономная наладка пневма! ических систем передачи выполпяе i ся, как правило, с помощью переносных приспособлений, включающих в себя контроль- ный маномет р, пневматический за; щтчик, запорную аппаратуру, гибкие шланги и наконечники ДJlя быстрого подсоединения приборов к проверяемой линии. Требования по допустимому падению давления и методика проведения опрессовки те же, что и лая импульсных линий (для нейтральных газов), рассчитанных на рабочее давление до 140 кПа. Допустимо падение давления на 5 % за 15 мин. если за это время отсутствуют заметные изменения температуры окружающего воздуха. В тех случаях, ко1Да есть уверенность в том, что опрессовка пнсвмолиний проведена, основным местом утечек может быть узел !1одсоедш1ения к прибору. При комплексной наладке пневматических систем автоматизации основное внимание должно быть уделено осушке и очис i ке воздуха питания oi масла и пыли, а также поддержанию в сети давления не ниже 200-300 кПа. 2.3. ДИФФЕРЕНЦИАЛЬНО-ТРАНСФОРМАТОРНАЯ СИСТЕМА ПЕРЕДАЧИ Упрощенная схема дифференпиально-рансформаторной системы передачи представлена на рис, 2,3. Да 1 чи к Д и вторич ный прибор ВП типов кед, КВД или КПД имею! аналогичные дифферентшально-трансформаторные преобразователи, первичные обмотки которых включены 1!Оследовательно и питаются 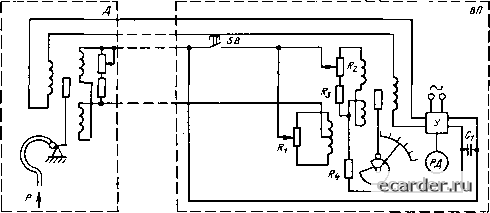 Рис. 2.3. Дифференциально-трансформаторная система передачи переменным напряжением 24 В от силового трансформатора усилителя У. Вторичные обмотки катушек, состоящие из двух секций, включены встречно Сердечник дифференци-ально-трансформаторног о мреобразовагеля датчика связан с чувствительным элементом (манометрической пружиной, мембраной) прибора. Сердечник преобразователя, встроен-hoi ,) во вюричный прибор, связан через эксцентрик с выходным валом реверсивно! о дви-гат1Х1я РД. При подаче переменного напряжения на тервичные обмотки преобразователей во ВТ01ЭИЧНЫХ обмотках индуцируется ЭДС, значение и фаза которой завися г о положения сердечника в катущке. При рассогласовании положений сердечник эв появляется сигнал разба:ганса, который после усиления приводит во вращение двигатель РД. При этом показания прибора и положение сердечника ВП изменяются до тех пор, пока сигналы рассогласования не станут равными нулю. Для наладки предусмотрены регулировка диапазона измерения (резистором R2) и уста-нов\а нулевого положения датчика (резистором R,). Цепь 1R4C1 обеспечивает необходи-мы11 сдвиг фаз. Кнопка SB предназначена для контроля исмравноСи системы. Для обеспечения унификации и взаимозаменяемости датчиков и вторичных приборов предмонтажная проверка их должна выполняться отдельно с помощью магазин! комплексной взаимной индуктивности Р5017. 2.4. ТОКОВАЯ СИСТЕМА ПЕРЕДАЧИ В промышленности наибольшее распространение гюлучила токовая сис тема передачи информации с диапазонами унифицированных СИ1 налов 0 - 5; 0-20 и 4 - 20 мА. Применяются ,1ве модифика1ши преобразователей, обеспечивающих двух- или теты-рехпроводную кабельную связь токовой системы. Двухпроводная система передачи информации реализуется датчиками типа «Сапфир», Отличающимися тем, что для преобразования механическо! о уС№шя в злек i рический сигнал используется пьезометрический эффект в полупроводниках. В )1ом cjrynae воздействие измеряемою параметра передастся тензомодулю рычажно-мембранного или мембранного типа Прогиб мембраны тензомодуля вызывает изменение сопротивления тензорезисторов, которое преобразуется во встроенном электронном усилителе в пропорниональный токовый СИ1 нал. HpoMbirUJreHHocib вьпгускаез несколько модификаций приборов, в частности «Сап-фир-22», «Сапфир-651», Сапфир-652», с индексацией преобразова rCjreft ДИ (давления избыточного), ДВ (давления вакуума), ДА (давления абсолютного), ДИВ (давления избыточного или вакуума), ДД (давления дифференциального), ДГ (давления гидростатического). Пи тание преобразователей тина «Сапфир» осуществляется от блоков питания БПЗ-24 или 22БЛ-36 стабилизированным напряжением соответс 1венно 24 В («Сапфир- 0 1 2 3 4 5 6 7 [8] 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 |