
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 [32] 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 S некоторых Случаях для регулировки овйзИ с Циркулятором (величины pnyj- Обычно ДПУ имеет два волноводных фланца: один служит входом-выходом сигнала (для подключения циркулятора), второй - входом мощности накачки. Для получения возможно больших значений коэффициентов включения рс.х и, следовательно, возможно большей полосы Д/пу необходимо стремиться к тому, чтобы электродинамический объем резонаторной системы контуров /с и fx был минимально возможным. Поэтому число вспомогательных режекторных фильтров для разделения цепей /с, fx и fu делают минимальным, а в .качестве контура fx используют не самостоятельный контур, а часть резонаторной системы сигнала. При этом для обеспечения минимальной величины /"пу, соответствующей, как уже указывалось, отсутствию вносимого извне в контур fx активного сопротивления, важно обеспечить достаточную (25-30 дб) развязку на частоте fx между контуром fx и входом ДПУ. Следует также учитывать, что в некоторых случаях из-за наличия паразитных резонансов в колебательной системе ДПУ возможно возникновение паразитной генерации на частотах этих резонансов, что ухудшает параметры ДПУ или полностью нарушает его работу как усилителя [24]. Более подробно вопросы построения конструкций ДПУ рассмотрены в [4-10, 15, 17]. В ДПУ мм ВОЛН, как уже отмечалось, из-за низкой добротности Q оказывается, что /i<fc (рис. 3.8) и, следовательно, входной волновод сигнала будет запредельным по отношению к частоте fx. Это заметно упрощает конструкцию ДПУ, т. к. необходимая развязка контура fx от входа ДПУ обеспечивается без применения специального разделительного фильтра из-за ослабления колебаний fx в запредельном для этой частоты волноводе сигнала. Пример конструкции такого ДПУ (fx=0,5fc) дан на рис. 3.10 *>, а его характеристики приведены в [13]. ДПУ представляет собой волноводныи крест внахлест, эбразо-ваиный волноводами сигнала и накачки, в месте пересечения которых находится волноводно-коаксиальный переход с держателем диода. Контур fx включает в себя емкость (Сер) и индуктивность контактной иглы (Lk) диода, коаксиальные линии корпуса диода и его держателя, а также реактивности запредельных для частоты fz волноводов сигнала и накачки (расчет этих реактивностей см. в [5]). Электродинамический объем этой резонаторной системы сведен к миниму- *> Эта же конструкция может быть использована в качестве одноконтурного ППУ (см. [13]). 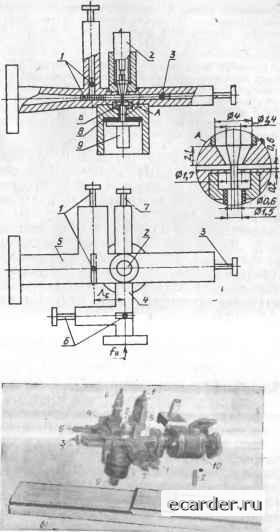 Рис. 3.10. Упрощенное изображение конструкции (а) и общий вид ДПУ 8-мм диапазона (б): /-поршни -трансформатора частоты f; 2-диод коаксиальной конструк-SaKa4KH"nSv4fiif} i -"°Р"ень волновода сигнала; 4-волновод 0 6X7 2«i,V- „п, „и 7°""°"°? """ <3-*><-2 с переходом на и.ьх7.г мм}, в -поршни -трансформатора частоты f- 7-поршень волно- °™oTT"neD7KZSfS "Р>«-"=Д«<0-1 S-подача смещения на диод, /о - переключаемый ферритовый циркулятор (см. рнс. 1.24-1.26). му и определяется только физическими размерами корпуса диода и размерами волноводов. Настройка контура fi на частоту (fn-fc) осуществляется регулировкой смещения на диоде Uo (изменением Сер) и либо перемещетем диода в держателе по высоте, т. е. изменением длины коаксиального отрезка линии, либо подстройкой частоты fs- В контур fc входят все элементы контура fx, а также два настроечных элемента: входной £Я-трансформатор [25] и задний ко-роткозамыкающий поршень. С их помощью (после настройки контура fx) производится настройка контура fo в резонанс и установка необходимой величины входного КСВ (рпу) для получения желаемого усиления Ко- Органы регулировки волновода накачки служат для согласования его с генератором накачки. К широкополосным конструкциям ДПУ относятся так называемые балансные ДПУ [7, 9, 10}. Последние содержат не один, а два диода (изготавливаемые иногда в едином корпусе или на единой подложке), параметры которых должны быть достаточно идентичны, а их частоты последовательного резонанса должны равняться частоте fx- Диоды включают встречно-параллельно, при этом их реактивности Сер « Lk образуют замкнутый контур с резонансной частотой, равной fx, причем на зажимах этого контура, к которым подключаются цепи fc и fn, напряжение частоты fx равно нулю. Следовательно, контур fx оказывается изолированным от всех внешних цепей без специальных разделительных фильтров. Однако при разработке балансных ДПУ коротковолновых диапазонов возникает ряд трудностей, связанных прежде всего с отсутствием специальных диодов, имеющих малый разброс параметров в паре. Наконец, следует учитывать, что в настоящее время вед}пх;я работы и на ЯсЮ см уже созданы интегральные полосковые и микрополосковые ДПУ (рис. 3.11), обладающие весьма малыми размерами и представляющие поэтому большой интерес как новое и перспективное направление развития техники ППУ [8]. Стабильность характеристик. Обеспечение необходимой стабильности характеристик ДПУ при изменении условий окружающей среды (температуры, влажности) и при воздействии других дестабилизирующих факторов (изменения Uo, /н, Рв, импеданса источника сигнала) является одним «з важнейших вопросов его проектирования, поскольку это усилитель регенеративного типа. Нестабильность характеристик ДПУ (изменения Рпуц, Knj, Afny, /со) возникает как из-за непосредственного воздействия указанных факторов на элементы собственно ДПУ (что приводит к изменению Рв, Сер и расстройке 204 контуров), так и из-за вызванного ими изменения параметров циркулятора. Обычно наиболее критичным к дестабилизирующим воздействиям является усиление ДПУ, а также полоса Л/пу и средняя частота полосы пропускания /со. Механизмы возникновения нестабильностей и методы их уменьшения рассматриваются в [4-7, 9].  Рис. 3-11. Пример конструкции микрополоокоаого интегрального ДПУ 10-сл диапазона (см. описание в [8]): I - вход: 2 - циркулятор; 3 - выход; 4 - вход питания генератора накачкн; 5 - генератор накачки иа лавнино-пролетном диоде; 6 - фильтр в цепи генератора накачки; 7 - параметрический диод; 8 - согласующий трансформатор частоты t; 9 -подача смещения Величина нестабильности усиления зависит от значений /Со и и уменьшается с уменьшением Ко и (или) с увеличением Q [22]. Следовательно, по мере укорочения рабочей длины волны (уменьшение Q) нестабильность усиления при одном и том же Ко возрастает (подробнее см. в [22]). Таким образом, для наиболее коротковолновых ДПУ допустимые дестабилизирующие воздействия являются наименьшими. В частности, требования к стабильности окружающей температуры и параметров (/ш Рв) генератора накачки (ГН) Я1вляются наиболее жесткими. Например, в ДПУ 8-мм диатазона (рис. 3.10), в котором Q= =0,9-i-l,6, при /Co=15-i-17 дб нестабильность усиления величиной AKcfKo=l дб возникает в некоторых случаях уже при изменении мощности Рв иа 1.5-2% или частоты / ча 0,015-0,02%. Такие даи- ные можно использовать в качестве критерия оценки максимально дсшустимой нестабильности Рн и fa генератора накачки для этого Для снижения или исключения влияния .изменения окр на характеристики ДПУ производят термостабили-зацию или термостатирование ДПУ с циркудятором. Простейшим и часто используемым методом термостабилизации (термостатирования) является метод следящего автоматического подогрева ДПУ с циркулятором (или всего блока ДПУ) до максимальной температуры окружающей среды окрмакс которая выбирается в качестве рабочей температуры ДПУ и поддерживается приблизительно постоянной при всех значениях окр. По принципу построения такая система автомагического подогрева может быть аналогична описанной в п. 1.3.1,е. При термостатировании блока ДПУ таким методом все тепловыделяющие элементы его схемы, включая ГН, должны быть вынесены за пределы термостатируемого объема, чтобы при окр = окр макс температура внутри блока не превышала окрмакс ГН, как правило, также нуждается в термостабилизации для обеспечения стабильности Р н И /н. Одним из методов повышения стабильности характеристик ДПУ является каскадирование [5, 9], например, использование двух каскадов ДПУ вместо одного с общим усилением, равным усилению одного каскада, т. е. KiiKKi- K2 = KiK, где Ki = Kz= V KiK. При этом повышение стабильности обусловлено снижением усиления на каскад. Однако следует учитывать, что на мм волнах вследствие уменьшения Q выигрыш в стабильности усиления ДПУ при каскадировании может быть частично или полностью потерян при недостаточно мдлых потерях в циркуляторах и ферритовых вентилях для межкаскадной развязки. Это обусловлено тем, что для сохранения такой же величины общего коэффициента шума Рпуц, как и в однокаскадной схеме, приходится из-за потерь в ферритовыхустройствахустанавливать/Ci = /C2> VКы-Расчеты нестабильности усиления *\ выполненные для ДПУ 8-мм диапазона с величиной «1,7, показали, что при потерях циркуляторов и вентиля Ln=l дб и при условии равенства величин Рпуц одно- и двухкаскадной схемы выигрыш в стабильности усиления последней по сравнению с первой мал и составляет ~15%. Правда, * Анализ и расчеты выполнены М, А. Хаславским и автором. кабадйровйние Приводит, вообще говори, к расширению А/пу\из-за уменьшения усиления на каскад. Но вместе с тей оно также усложняет конструкцию и настройку, увеличивает габариты и, главное, необходимую мощность Ри, что особенно существенно сказывается на мм волнах, где создание достаточно стабильных и мощных ГН затруднительно. В кфотковолновых ДПУ из-за меньшей электрической прочности диодов в ряде случаев используют дополнительную защиту от просачивающейся мощности устройства защиты приемника (Рпрос) с помощью переключаемого ферритового циркулятора (ПФЦ), описанного в п. 1.3.4. Для быстрого затухания переходных кoлeбaJ-тельных процессов в цепи смещения диода и связанной с ними паразитной модуляции усиления ДПУ, вызываемых резким изменением импеданса циркулятора на переднем и заднем фронтах импульса тока ПФЦ, а также для сохранения малого времени восстановления ДПУ после воздействия импульса Рпрос (даже если ПФЦ не используется) источйик смещения диода должен быть иизкоомным. Другими словами, сопротивление, с которого снимается смещение Uo, должно быть небольшим (порядка 100 ом) и первым элементом цепи смещения диода, шунтирующим последний. Генераторы накачки (ГН) со своими источниками питания являются важными элементами ППУ, в значительной, а для коротковолновых ППУ нередко и в решающей степени определяющие вес и габариты всего устройства ППУ. В качестве ГН используют, вообще говоря, такие же приборы и устройства, что и для гетеродинов (гл. 4), но с повышенными выходной мощностью (Рнвых) и стабильностью этой мощности и частоты /н. Высокая стабильность величин Рнвых и fu при климатических и механических воздействиях и«в течение срока службы является одним из важнейших требований, предъявляемых к ГН. Практически для коротковолновых ДПУ (/н лежит в диапазоне мм волн) до недавних пор в качестве ГН применяли в большинстве случаев отражательные клистроны. Обладая рядом достоинств, эти ГН имеют и существенные недостатки: низкий КПД и высокие питающие напряжения (1,5-2,5 кв при токе 15-30 ма), из-за чего приходится разрабатывать высоковольтные высокостабильные источники питания значительных габаритов и веса. Однако по мере соверп1енст- 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 [32] 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |