
|
| |
|
Слаботочка Книги 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 [42] 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 - 129 - КР1022ЕП1 установка vacmem/ вращения вала xoS" 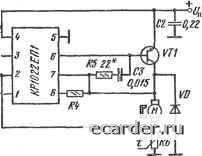 Типовая схема включения микросхемы КР1022ЕП1 В установившемся режиме для системы автоматического регу-шрования должно выполняться условие + 0, 6R4-i-5R,-, де R1-R4 - рассчитываемые номиналы резисторов, выраженных килоомах, а да -в омах; /?б-в=2,8±0,336 кОм- сопротивление JneKfly выводами 5 я 8 микросхемы, обеспечиваемое конструкцией кристалла микросхемы; /м -ток электродвигателя в установившемся режиме. А: 2п I W -вращающий момент электродвигателя, мНм; /?мн - сопротив-1ение обмотки электродвигателя. Ом; /Уоп.з-г - выходное напряже-ше опорного источника, В. Для оптимального регулирования dn/dm-0 необходимо выполнение условия 5R46 /?4 + 5/?б 8 Но если это условие выполнить точно, то в системе регулирова-[ия частоты вращения вала электродвигателя могут возникнуть ав-околебательные процессы, поэтому для обеспечения стабильности истоты вращения необходимо соблюдение условия 5/4/?6 , /?4-Ь5/?, , <«"- КР1в22ЕП1 -- 130 - Исходя из приведенных выражений резисторы внешней цепи в типовой схеме включения рассчитываются по следующим формулам: «6расч=Мн/5; (I) т > /?6расч. (2) где /?6расч - расчетное значение сопротивления, Ом; ближай- шее выбранное значение сопротивления из стандартного ряда номинальных значений сопротивлений. С учетом термокомпенсации изменения сопротивления обмотки электродвигателя резистор R6 должен иметь ТКС, равный ТКС обмотки электродвигдтеля. Если обмотка выполнена медным проводом, то величина ТКС резистора R6 должна быть в пределах 0,0036... ...0,004 l/X. Сопротивление резистора R4 рассчитывается по формуле где /?4расч - расчетное значение, кОм; Д/?м - норма на технологический разброс сопротивления обмотки электродвигателя. Ом. Если полученное в результате расчета сопротивления R4 не укладывается в стандартный ряд сопротивлений, то выбирается ближайшее меньшее значение. Суммарное сопротивление резисторов, подключенных между выводами 2 и 3, определяется исходя из нагрузочной способности источника опорного напряжения и должно быть не менее 20 кОм. С учетом этого суммарное сопротивлспие резисторов, кОм, между выводами У и 3 должно быть не более /?I-f/?2<20 -/?3. (4) Тогда сопротивление R3 определится из выражения • / \- 6/?4 + 5К5 Л Х/м + 0,01 /?4 + 5/?, J (Ri + 5i?5 8) £0/f/on,3-2 (Ш + 5/?5 s). где Д£„=1,035 B. Минимальное значение суммы двух резисторов RJ и R2 с учетом выражений (4) и (5) определится как (Rl + r2u,, = 20 - {(Е„, + AEJ - [jfl --(R„ + А/?„)] + 0,01 ] (R4 + + 5i?5 8) 20/t/,,.2-3.min (6?4 + 5/?5 8), (6) где АЕп - норма на технологический разброс противо-ЭДС электродвигателя. В; t/on,2-3,min =0,97 В-минимальное значение выходного напряжения опорного источника при 7=-1-25°С. - 13t KPf022Em 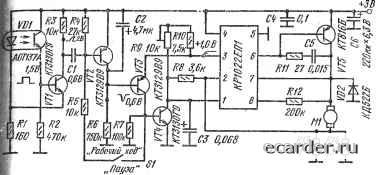 Принципиальная электрическая схема управления режимами рабо-(И и регулятора частоты вращения вала микродвигателя в микро-магнитофоне «Электроника М-401С» Аналогично максимальное значение суммы двух резисторов R1 R2 определится из выражения iRl + R2), :20-- /м + 0.01 6Ri + 5R-,~s 5RiR& Ri + 5R,-s (мн - i?4 + 5i?5 e X(6/?4-f 5/?5 e), де t/on,2-3,max= 1,12В-максимальное значение выходного напря- «ения опорного источника при 7=+25° С. Если один из этих двух резисторов будет подстроечным, напри- ер R2, то сопротивление постоянного резистора R1 будет равно ми-мальному значению суммы и определяться из выражения (6),асо-Отивление подстроечного резистора R2 будет равно R2 = {R\ + R2U -{R\+ R2Uin. аким образом, используя формулы (1)-(7), можно рассчитать все [оминалы внешних навесных элементов регулятора частоты враше-нгия вала для конкретного типа микродвигателя. Ниже приведена схема управления режимами работы микродвига-геля и регулятора частоты вращения его вала, применения в микро-1аагнитофоне «Электроника М-401С». Рассчитанные по приведенной Иетодике номиналы внешних навесных элементов регулятора частоты Рращения вала для микродвигателя типа ДП20-0,1-У1.1 имеют следующие значения: R6=0,72 Ом (обозначение элементов соответству-!т типовой схеме включения); R1=7,5 кОм; R2=10 кОм; RS= ьЗ,6 кОм; R4=2QQ кОм; транзистор VT1 типа КТ816Б со статичес-сим коэффициентом передачи тока базы не менее 30. Управляющая часть схемы содержит датчик автостопа на опто-йре VD1 типа АОТ137А, усилитель-интегратор импульсов на тран-жсторе VT1, VT2 и управляющий ключ иа транзисторе VT4, В ре- 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 [42] 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 |