
|
| |
|
Слаботочка Книги [1] 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 автоматическое управление электроприводом М-1. ОСНОВНЫЕ ЦЕЛИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ, КЛАССИФИКАЦИЯ СИСТЕМ УПРАВЛЕНИЯ Техннческнй прогресс в самых различных отраслях промышленности связан с непрерывно усложняющейся технологией производства, с повышением требований к точности изготовления изделий и их качеству при все более сложном процессе их обработки. Вместе с тем растет объем производства, что выдвигает требование повышения производительности машин за счет увеличения как их мощности, так и скорости обработки изделий. Поскольку подавляющее большинство производственных маши н осиащаегся электрическими приводами, возрастание требований к этим машинам ведет к ужесточению требований к электроприводу, на который возлагается задача осуществления сложных перемещений рабочих органов механизма, В процессе реализации этих перемещений возникает иеобходимость разгона, торможения, реверса электропривода, поддержания постоянства регулнрушой величины (координата), изменения ее по определенному закону и т. д. Механизм может быть оборудован несколькими электроприводами, каждый со своими собственными системами управления. Может возникнуть необходимость согласованного управления электроприводами нескольких механизмов, каждый из которых имеет свою систему управления. Эти системы (/, 2,...), выполненные как аналоговые, цифровые илн как нх комбинация, входят в качестве локальных систем в общую иерархическую структуру автоматической системы управления технологическим процессом (АСУ ТП) с помощью управляющей вычислительной машины (УБМ) (рис. 1-1). Задачей УВМ яв ляется управление технологическим процессом и, в соответствик с предъявляйкшми требованиями, выдача управляющих воздей- 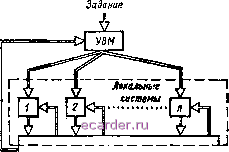 05ьеш автоматизации Рис. М ствий на локальные системы управления электроприводом. В свою очередь сами локальные системы могут включать в себя мини- или микро-ЭВМ, с помощью которых обеспечивается требуемый алгоритм управления. Системы управления электроприводами могут быть подразделены на системы с разомкнутой и замкнутой цепью воздействий. В системе с разомкнутой цепью воздействий (разомкнутая система) отсутствует обратная связь, вследствие чего при возникновении отклонения выходной переменной от предписанного ей значения, вызванного тем или иным возмущающим воздействием, сигнал управления иа входе системы остается неизменным. Примером может служить двигатель М, питающийся от преобразователя П и приводящий в движение механизм, который включает в себя исполнительный орган (ЯО) и кинематическую связь {КС) (рис. 1-2, а). Выходной переменной является обычно скорость или перемещение ИО механизма, что при жесткой связи между двигателем и механизмом соответствует скорости или углу поворота ротора двигателя. Не исключается, однако, возможность контроля других переменных системы, например якорного или статорного тока, напряжения илн частоты преобразователя, тока возбуждения двигателя и т. п. Преобразователь П представляет собой источник питаиня с регулируемым выходом. Для электропривода постоянного тока - это преобразователь переменного тока в постоянный с регулируемым выходным напряжением, для привода переменного тока - преобразователь частоты, в котором наряду с частотой может изменяться и напряжение. Изображенные на рис. 1-2, а преобра-вователь, двигатель н механизм составляют силовую часть электромеханической системы, основным назначением которой является преобразование электрической энергии в механическую. На преобразователь, двигатель и механизм действуют возмущения в виде изменений напряжения питающей сети, изменений момента нагрузки и т. п. и возмущения приводят к отклонению выходной координаты от предписапного ей значения, причем значение этого отклонения в статике и характер его в динамике при данном возмущении определяются параметрами преобразователя, двигателя и механизма. В системе с замкнутой цепью воздействий (замкнутая система) управление, действующее на силовую часть, изменяется при отклонении истинных значений выходных переменных от предписанных что достигается путем введения обратных связей с выхода системы иа ее входы (рис. 1-2, б). Выходные переменные силовой части системы и механизма Мх измеряются и преобразуются в пропорциональные им электрические сигналы с помощью измерительно-преобразовательного устройства (ИПУ). В его состав могут входить тахогенераторы, измерители положения илн тока, цифроаналоговые или аналого-цифровые преобразователи и т. д. Сравнение истинных значений управляемых переменных с соответствующими предписанными значениями производится на входах регулятора Р. Регуля- тор и ИПУ образуют управляющую часть системы, назначением которой, таким образом, является получение и обработка информации о координатах силовой части и выработка на основе этой информации управляющих сигналов, воздействующих на силовую часть с целью обеспечения желаемого характера изменения координат системы. \--7. i 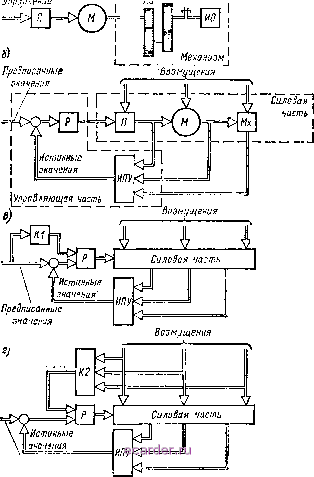 предписанные значения Рис. 1-2 Если классифицировать замкнутые системы по принципу построения, то описанные выше системы относятся к системам с регулированием по отклонению, так как на входах Р существуют сигналы управления, пропорциональные отклонениям истинных значений [1] 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |