
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 [102] 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 Тогда объект управления в контуре регулирования тока будет описываться передаточной функцией Если стремиться к сохранению динамических свойств замкну, того контура регулирования тока в режимах прерывистых н непрерывных токов, то регулятор тока для прерывистого режима должен быть интегральным: in) т - t.A.t , Wp-TtP; - Г7 г, Тр. 1 --К7 где tp.x - постоянная времени РТ; Ti = Т , Принимая во внимание (9-14) и (9-15), постоянную времени РТ можно записать как Тр, т --Л . Таки.м образом, при переходе электропривода из режима непрерывных токов в режим прерывистых токов необходимо перейти от структуры ЯЯ-регулятора тока к структуре Я-регулятора н изменять постоянную времени РТ пропорционально квадрату угла проводимости тиристоров. Техническая реализация адаптивного РТ с переключением структуры и нзгенениен параметров может быть, например, такой, как показано на схеме рис. 9-6, а. Регулятор тока состоит из последовательно соединенных звеньев; пропорционально-интегрального, инерционного н пропорционального. Блок управления регулятором (БУР) производит переключение структуры РТ и изменяет постоянную времени интегрирующего звена прн работе в режиме прерывистых токов. Логический блок (ЛБ) фиксирует моменты отсутствия тока и подключает в этом случае БУР. Прн непрерывном токе ТП резистор 4 зашунтирован ключом Ki. в качестве которого может быть использован полевой транзистор, а сопротивление резистора /?5 имеет начальное значенне, равное значению сопротивления резистора i?g. Тогда передаточный коэффициент усилителя 2 будет равен единице. Полагая, что выходное сопротивление усилителя ) мало, постоянной времени инерционного звена при шунтировании можно пренебречь. Тогда регулятор тока будет -регулятором с постояннылш параметрами. При появлении прерывистого тока ЛБ подключает БУР. Ключ Ki размыкается н остается разомкнутым до тех пор, пока существует прерывистый ток, Введенное в схему сопротивление совместно с емкостью образуют инерционное звено, постоянная времени которого равна постоянной времени -регулятора (т.з = тГр.у). Сопротивление R коммутируется с помощью клюга Ка управление которым производится от широтно-кмпульсното модулятора {ШИЩ со скважностью, пропорциональной квадрату угла X, Регулятор рэка становится -регулятором с изменяющейся постоянной вре- мени, Для того чтобы получить сигнал, пропорциональный квадфату угла К необходимо получить сигнал, пропорциональный X, и пропустить его через квадратичный преобразователь. Последователь- Штибный регудтор шина 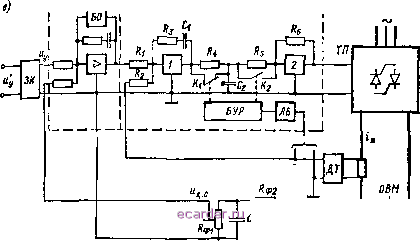 ность получения такого сигнала ил- 5) люстрнруется рис. 9-6, б. Постоянное напряжение Ua модлнруется в соответствии с прерывистым током /я и сглаживается. Получается напряжение ui, пропорциональное Я. Сопротивление/s будет изменяться пропорционально ai. Передаточная функция такого регулятора U7 / \ P J 1 гЧ г\ У Рнс. 9-6 где {Щ = (Л) ?в -переменный Коэффициент усилителя 2. Схема самонастройки значительно упрощается, если использовать управление значением сопротивления пропорционально %, Тогда коммутация ключа K.i производится сигналом д и не надо использовать допашнтельный ШИМ. Такое управленце возможно, ли угол ?- с определенным запасом отличается от 0. В этом случае повышается также н быстродействие контура перенастройки параметров РТ, а переходные характеристики замкнутого контура тока приближаются к характеристика.м, соответствующим стандартным настройкам при ступенчатых изменениях воздействий в системе с непрерывным током якоря. 9-2-5. АДАПТИВНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ С НАБЛЮДАЮЩИМИ УСТРОЙСТВАМИ ИДЕНТИФИКАЦИИ Рассмотрим применение адаптивного наблюдающего устройства идентификации в самонастраивающейся следящей системе. Возшем для примера ту же нестационарную систему электропривода, что и в п, 9-2-3. В электроприводе происходят непрограммируемые изменения момента инерции. Для простоты считаем, что в замкнутой следящей системе обратной связью по ЭДС двигателя южнo пренебречь и момент сопротивлении остается постоянным. 05ъет упребмния i-го пвряЗна у а Рис. --7 Адаптивное наблюдающее устройство, идентифицирующее изменяющееся значение момента инерции, выполняется в соответствии с основными положениями, изложенными в п. 9-1-3, В качестве управляющего воздействия на нестационарную часть объекта рас-слщтривается ток двигателя, а в качестве выходной координаты - скорость двигателя. Неизвестная линейная часть объекта имеет передаточную функцию (9-16) у с Ь и J р р * где, по аналогии с используемым в п. 9-1-3 обозначением координат объекта, принято: у ~ щ и = i . Идентификации подлежит параме1р b = oJJ, 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 [102] 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |