
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 [107] 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 ясе корреляция между Дф х (О и Дф .д1(А. Дфп.да {)- Средние квадраты величин Цд и i - 1 находятся в соответствии с выражениями Учитывая, что помехи фп.д! (О Дфп.да fO отпссятся к одному я тому же стационарному процессу, имеем Дфп д1 Дфп.д(О- На осиоваини приведенных выражений можйо записать гд ftix ~ дисперсия действительной угловой ошибки системы. 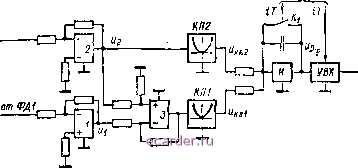 Ьс=ь ------J тилв Рис 9-16 Вычисление дисперсии ошибки в соответствии с выражением (9-28) производится с помощью суммирующего усилителя 3 fpiic. 9-16, а), двух квадратичных гРеобразоаателей КП1 и КП2 и интегратора И с постоянной времени 7 , осуще-гвляющего усреднение сигнала за конечный интервал вреиени Т. Устройство ыоорки.хранения [УВХ] предназначено для запоминания на время Гсигнала U снимаемого с выхода интегратора в дискретные моменты времени и несущего в себе информацию о текущем зкаченни дисперсии ошибки. После запоминания {/ кратковременным замыканием интегратора ключом Ai осуществляется установка его в нуль. Управление интегратором и УВХ производится от генератора тактов, расположенного в БУ. При измерении дисперсии действительной ошибки по скорости масштаб пые усилители 1 а 2 должны быть заменены двумя идентичными друг дру1> диф. феревцяруюцу1ми усилителями. С учетом передаточных коэффициентов квадратичных преобразователей *к.п1 = *к.пг = к.п и интегратора Г/То соотношення между напряжениями на выходе БВД и дисперсиями Оф и угловой и скоростной ошибок находятся в виде где Тд.у = Тд.у! = Гд.у2 - постоянные времени дифференцирующих усилителей. С целью быстрого выхода в окрестность экстремума и отслеживания дрейфующего положения экстремума в подсистеме поиска минимума дисперсии дей ствительной ошибки использован комбинированный алгоритм поиска с перенастройкой в окрестности экстремума алгоритма метода дихотомии на шаговый автоколебательный алгоритм. Выбор алгоритма поиска обусловлен следующим. Крутизна кривых (И(.р) (см. рнс, 9-15) в сильной степени зависит от скорости механизма о) х и отклонения частоты Мер от оптимальных значений, в связи с чем градиентные алгоритмы не обеспечивают быстрой сходимости процесса поиска при широком диапазоне регулирования скорости и нагрузки. Напротив, геометрические методы, в частности метод дихотомии, обеспечивают наименьшие затраты времени на поиск экстремума, а для отслеживания дрейфа экстремума производится переключение системы на пгаговый алгоритм поиска с совмещением пробных и рабочих шагов Исходная точка для поиска экстремума задается начальной частотой среза Мср.цачг определяемой из выражения где Аа>ср - начальный интервал неопределенности, Дюр = а> ср.иакс-ср-шш; ср мйкс ftcp.MHH - максимальное и минимальное значения частоты среза, определяемые на основании априорных сведений, исходя из возможных в процессе функциовирорания системы диапазонов изменения скорости и нагрузки. С целью выявления направления первого шага в окрестности Шср.нач делаются два измерения дисперсии ошибки при значениях частоты среза мр - flco где - пробный шаг. Затем делается первый рабочий шаг AtOcpi- Значение (-го рабочего шага [ Awjp [ и его знак sign Aiopi определяются в соответствии с выражениями sign AtO(;pi=-sign [D(o)cp;--(?(£,) - D(a>;p, - (?JJ, ( = 2, 3, .... где солрг - частота среза системы иа f-м рабочем шаге. После форчировапия 1-го рабочего шага дихотомии Аадр в районе экстре мума функции D ф(о)ср) в блоках БУ и БПМД осуществляются переключения, обеспечивающие перестройку алгоритма поиска. Рабочий шаг в последующем остается постоянным и равным последнему рабочему шагу дихотомии ДМсрг Изменение частоты среза на /-м шаге поиска шагового алгоритма записывается в виде f Ао)..р/ 1, если Оф; 1<0; I - AcDspji, если Оф( , > 0. Минимальное значение АюсрЬ з следовательно, и рабочий шаг ДсОср/ виби-лаются из условия возможности оценки ЛОф на уровне помех измерения дисперсии. Время поиска экстремума определяется числом / шагов дихотомии и интер-ва.пом \среднения Т. Перестройка параметров основной части системы производится путем изменения параметров РП (рис. 9-16, б) Пренебрегая упругими связями в электроприводе и представляя замкнутый контур регулирования тока безынерционным звеном l¥;g (р) - Ьд , можно записать передаточную функцию разомкнутого контура положения с учетом перенастраиваемых параметров в следующем виде: Р \*ср / где п, ш - коэффициенты: - частота среза. Соогветстзующая этой передаточной функции ЛАЧХ показана на рис, 9-16, б. Принимая во внимание, что передаточная функция неизменяемой части системы (см. рнс. 5-П) равна где ~ j)< передаточная функция регулятора положения Схема РП (рис. 9-16) соответствует преобразованному выражению (9-29) с учетом технической возможности перепрстройки параметров с помощью ШИМ. Перенастройка производится воздействием на речисторы РП таким образом, чтобы изменение нх проводимостей приводило к изменению частоты среза сор системы и сохраняло постоянными соотношения сопрягающих частот (йрп и ГЛАВА ДЕСЯТАЯ МОДЕЛИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ 10-1. ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ Бурное развитие вычислительной техники обеспечило ее широкое применение для автоматизации проектирования и научных исследований. Эффективность применения вычислительной техники для этих целей несомненна. Внедрение систем автоматизированного проектирования (САПР) позволяет в среднем в 5-6 раз повысить производительность труда проектировщиков, сэкономить до 30 % штерналов. В некоторых случаях можно говорить и о более высо- чх пиказателях. Внедрение автоматизированной системы модели- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 [107] 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |