
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 [11] 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 б) форма Баттерворта, при которой Н (р) в зависимости от порядка системы выбирается в виде рз+1,4иоР-!-б)5; p*-I-2,Gwop3 -3.4Mp3-b2,6a)p-f и,;; р5 3.24wap* + 5.24шр + 5.24ш.;р2 3,24и1р (1-23) Отметил!, что посчедняя форма при втором порядке системы приводит к характеристическому уравнению с коэффициентом демпфирования % = ]2/2, соответствующему настройке на оптимум по модулю. По мере увеличения порядка системы при данном значении колебательность несколько растет, но зато дли-тельн(х:ть процесса увеличивается в меньшей мере, чем при биномиальной форме. Записав выражение det [р-{А-КС)]=Я(р) н приравняв коэффициенты при одинаковых степенях оператора р, moxiho определить требуемые значения коэффициентов связей наблюдателя, являющихся элементами матрицы К- 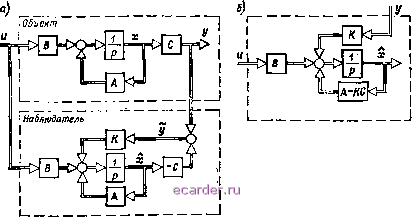 Рис. 1-16 Выбор частоты щ, определяющей быстродействие наблюдателя, в общем случае представляет собой сложн\то задачу. Если бы структура и параметры стационарного линейного объекта были точно воспроизведеггы в наблюдателе, а все внешние воздействия, приложенные к объекту, действовалибы и иа наблюдатель, jiaK это показано па рис. 1-16, о, то замыкание системы управления по восстановленным координатам л было бы эквивалентно замыканию по реальным коорди-латам X (если бы они могли быть измерены). Собственная динамика наблюдателя кpи этом не влияла бы иа динамику системы, замкнутой через него. Это становится очевидным из рассмотрения рис. 1-16, а: при описанных условиях всегда соблюдается равенство х= х, благодаря чему у = О, связь через матрицу К не 4)аботаег. Однако практически всегда существует некоторое несоответствие между математическими описаниями объекта н наблюдателя. Кроме того, иа объект мотут действовать возмущения, которые невозможно измерить и ввести на наблюдатель. Поэтому желательно няеть -выоекое быстродействие наблюдателя, так о* - 85 как различие между реальными и восстановленными координатами бдет в общем случае тем меньше, чем выше щ С другой стороны, поскольку обычно на измеряемые координаты объекта у и внешние воздействия и наложен шум в виде более и1и менее высокочастотных пульсаций, увеличение щ может гривестн к недопустимому увеличению уровня шума на выходах набтюдателя Обычно рекомендуется выбирать ©о так, чтобы быстродействие наблюдателя бычо несколько выше быстродействия системы, которая через него замкнута 1-4-5. РЕДУЦИРОВАННЫЙ НАБЛЮДАТЕЛЬ Рассмотренный в предыдущем параграфе наблюдатель называют наб1юда шлем полного порядка Он оценивает весь вектор состояния, несмотря на то что компоненты вектора у, входящие в состав вектора х, могут быть измерены непосредственно Для восстановления лишь тех переменных, которые не могут быть непосредственно измерены, наблюдатель может быть выпо1нен как редуцированный, или наблюдатеяь пониженного порядка Все переменные состояния объекта, составлякяцие вектор х, можно разделить иа измеряемые, которые образуют вектор у размерности г, и неизмеряемые, образукяцие вектор w размерности ( - /), т. е. записать Тогда уравнение х = Ах -Ь Вц может быть переписано в виде
или, что то же самое. y=Ai(y+Ai2w-!-BiU W=Aja у-]-A22W+B2U (1-24) (1-25) Эти матрицы имеют размерности* Aij - г X {п - г), А21 - (я - г) Х г; А22 - (л - /) X (л - ;-), Bi - X 1, Ва - (я - /) X I На основании btoioi о уравнения можно рассматривать часть системы с выходным вектором w, Д1я которой входными воздействиями являются BjU и А21У Для этой части системы по изложенным выше принципам строится наблюдатель, на входе которого дей ctbvtot векторы и и у соответственно через матрицы В и А, а также вектор ошибки восстановления через некоторую матрицу L, Матрица L в редуцированном наблюдателе играет ту же роль, что и матрица К в наблюдателе полного порядка Вектор W неязчеряем Однако он может быть измерен косвенно через вектор входного воздействия и измеряемый вектор у в соответствии с первым уравнением системы (1-25) Ai2W=y-Апу -Bju. Для получения в определенном масштабе вектора ошибки w надо умножить вектор восстановленных координат w слева на матрицу -Ajj и определить разность AjjW - AijjW. После умножении на L ее следует ввести на вход наблюдателя Сказанное поясняет матричная структурная схема (рнс 1-17, а) Группируя входные каналы с матрицами Bg и -LBj, А и -ЬАц и перенося сигнал ру, со входа на выход иаблюдакицего устройства, что ноэвачнет избежать операции дифференцирования, можно получить структурную схему рис I-I7, б, а затем, вынося точку суммирования за точку съема, -схему рис. 1-17, в, где обозначено G = Aai -LAn+(A22-I-LAi2) Lj F = Aja - bAia, Вектор z представляет собой вектор переменных состояния наблюдателя. Он связан с вектором восстановленных неизнненых координат w и вектором к линейным преобразсюанием zw- Ly, Учитывая, что в редуцированном наблюдателе полный вектор восстановленных координат формируется как можно записать, что где Т = [ - L II Тогда Вз - LBi = ТВ 2=ТХ, (1-26) 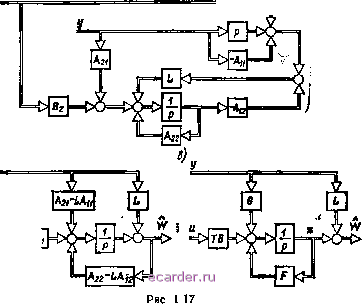 Системы с применением набтюдателей получают распространение в АСУ ЭП Если параметры объекта не остаются неизменными, то возникает необходимость в применении более сложных наблюдающих устройств с адаптацией, которые рассматриваются в гл 9. Если стремятся повысить быстродействие АСУ ЭП за счет расширения объема информации об объекте, то надо иметь в виду, что линейное описание системы всегда представляет собой определсииое упрощение Неучтенные при npoeKTHpoBaiJHH наблюдающего устройства нелинейности будут тем больше влиять на работу АСУ ЭП, чем выше быстродействие, которое стремятся реализовать. Кроме того, в электромеханической системе получение высокого быстродействия связано с необходимостью обеспечения больщих динамических моментов двигателя, а следовательно, и больших нагрузок на элементы механизма Поэтому вопрос о целесообразности использования наблюдателя в АСУ ЭП должен решаться в каждом отдельном стучае с учетом конкретных условий проектирования. 1 2 3 4 5 6 7 8 9 10 [11] 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |