
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 [13] 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 s виде А/в(р) Айв (Р) ДФ (Р) (Гв.б+7в.т.б)Р + ~ {.6 + b.T.6)V + (2-10) Входящие сюда постоянные времени, переписанные с учетом выражения для кф 11 формул (2-3 и 2-4), W Ф, Со.вв.б Фб <.в АФ O.B.TAf ~ (2.П) (2.12) представляют собой постоянные времени возбуждения и вихревых lOKoe, определенные в рабочей точке при Ф Фнач С учетом этого может быть записано A/r = (Гв+П.т)Р+1 ДФ= . . ЛГ . (2-13) 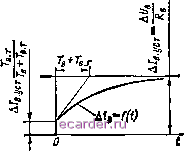 Рис. 2-4 Постоянную времени вихревых токов Тв, г можно экспериментально определить по осциллограмме приращения тока в обмогке возбуждения двигателя при подаче на нее ступенчатого приращения напряжения возбуждения Дв (рис. 2-4). Длительность нарастання тока возбуждения определяется суммарной постоянной времени (Гв + Тл). После ее определения по амплитуде наэльного скачка тока возбуждения легко высчитать значение Гв.т- После линеаризации уравнений (2-Й) они запишутся в виде Дё,.п = ФвачД + йвач ДФ +Ря.ц {Тз,аР + I) Ul Составленная на основе этих уравнений и уравнений (2-13) линеаризованная структурная схема двигателя, управляемого изменением ЭДС преобразователя и напряжения на обмотке возбуждения, имеет вид рис. 2-5. Из нее могут быть получены передаточные функции для двигателя, управляемого только по иепи якоря прн постоянном потоке, и для двигагеля, управляемого только по цепи возбуждения; Д<3(р) i 1 . А(й (р) Лйв(Р) 17в Р(П.цР+0+1Л(7в + П.т)Р+1]* (2.15) Реакция двигателя на воэмутцение в виде изменения момента нагрузки хера ктершуется передаточной функцией Лм (р) (2-16) А (р) Электромеханическая постоянная времени Гдм С8я1анз с введенной ранее механической постоянной времени выражением Гэм= PaoTJd определяется как я.н . 2-17) -Кроме того, обозначено где Да>с = я.начРя цФ1!ач - падение относительной скорости двигателя при *
Рис. 2 5 нзмснеяян его нагрузки от идеального холостого хода до /д. идч. 7 -Т А5)с Пр( записи передаточных функций в а е. коэффициенты в передаточных ф1[К[ШЯХ ДСО (р) Дйт.а (й). A iJ {р)/ДИз (Р\ Дм {P)/A.W; (р) буЦУГИМСГЬ вид COOT-ьетсгвен. о 1Я~дФнач). = Ф а>о.в1<ч.ч ~ /(?о.зФнач) И /а /(гдФялч) . Здесь Йф определяется ПО кривой намагничивания в а. е, также, как на рис. 2-2, а падение скорости есть Дш = /а. няч/?в.ц/{дф1ач) 2-1-3, НЕРЕВЕРСИВНЫЙ 7П, РАБОТАЮЩИЙ НА ДВИГАТЕЛЬ, ПРИ НЕПРЕРЫВНОМ ТОКЕ Тиристорный преобразователь (ТЯ), рабогающий на нагрузку, можно пред-стжить в виде трех основных частей (54]: системы вчпульсно-фазового управления {СИФУ), собственно тиристорного цреобраэовагеля и нагрузки (рис. 2-6, а). Назначением СИФУ является преобразование непрерывною в\одного сигнала управления иу в фазовый сдвиг отпирающего импульса а (формируемого генератором импульсов ГИ), отсчитываемый от момента естестввгыого отпирания тиристора. На рис, 2-6, б для фазы о покаэано пилообразное опорное напряжение с линейно-нарастающим рабочим участком аб. Значение 1[ачального угла управления эч устанавливается напряжением смещения 0 на входе СИФУ. Ери увеличении действующего встречно смещению входного сигнала Цсу угол упоавлепия уменьшается. Если изменению mi = л/2 (w - круговая частота напряжения питания) соответствует изменение напряжения па выходе генератора питообразного напряжения (ГПН), равное i/r.n пт, то на основании соотношения г. п.нт можно записать выралгение, связывающее угот управления с сигналом па входе СИФУ: *с. у 2 Сг. п,нт (2-18) При использовании в качестве опорного напряжения косинусоиды с амплитудой Uni проходящей через нуль при а = 90°, угот управления определяется как aatccos где C/tu/fm - С0за ач. (2-19) 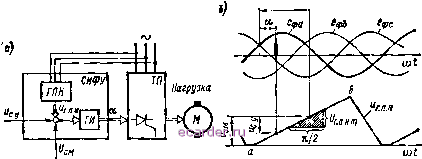 Рнс. 2 6 Характеристики преобразователя различны в зависимости от характера тока нагрузки. При достаточно большой индуктивности цени нагрузки в больше части диапазона изменений тока нагрузки последний имеет непрерывный характер. Прн этом напряжение идеального холостого хода (ЭДQ тиристорного преобразователя однозначно определяется углом а, а следовательно, напряжением управления Ысу. Если пренебречь падением напряжения в тиристорах и активным сопротивлением фазы трансформатора, то напряжение на выходе преобразователя будет отличаться от ЭДС только на падение напряжения, обусловленное явлением коммутации. Для широко распространенной трехфазной мостовой схемы его среднее значе1ше получается в виде т.п Д-и ф Л, Ф в где эффективное значение фазной ЭДС на вторичной обмотке тран матора (или напряжения сети, если трансформатор пе применяется); 1 - нее значение тока нагрузки; со - круговая частота напряжения сети; Л-ф -Дуктйеносгь фэ1ы трансформатора или сети. Первое слагаемое (2-20) представляет собой ЭДС ТП (2-20) сфор-сред -- ин- где Е.ат= dm ~ *сх£ф. (2-21) 43 1 2 3 4 5 6 7 8 9 10 11 12 [13] 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |