
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [16] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 ления, значение которого на основании характеристики 3 определится как arocos 1 Jc Дальнейшее увеличение тока нагрузки прн неизменном значении ЭДС, например до точки г на кривой Е. = f (а.) будет происходить в области непрерывного тока, и связь между ЭДС и углом управления будет определяться участком вг кривой т.п 2,34 £ф созацпр. Если для данного актеристик типа 1, 2 и 3 значения £д имеется семейство характеристик нагрузки 07 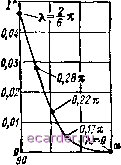 100 т Рис. 2-9 должно быть с.у ~ с.у с в диапазоне токов /д.гр и для кан<дой из них известно значение угла управления, участок обе кривой Ет, = f (а) при Ед = const может быть легко построел. Аналогичные построения могут быть про-йпведены для различных значений £д. На рис. 2-8, б показаны соответствующие кривые для Ед = s=0 (авг) и отрицательного значения £ (а 6 г ). Когда преобразователь работает в ипверториом режиме при i £д I > I Ят- п I и прежнем направлении тока. На рис, 2-8, б показано построение регулировочных характеристик £т.п = /( су) Р -пиейной Зависимости а/(Ыс.у) и напряжении смещения на входе выбранном так, чго начальное зна- чение >тла упргвлеиия составляет вач = 2п/3, что при любой индуктивности якорной цепи гарантирует отсутствие токл якоря при к,.. = 0. Д-я того чтобы двигатель работал прн ЭДС £д и токе нагрузки / , напряжение управления на входе СИФУ Счагаемоец У обеспечиваег часть ЭДС пре- sin 7г образователя, покрывающую ЭДС двигателя и равную £ nmi- п Wr.n.nm - прираще}П1е пилообразного опорного напряжения, соответствующее приращению угла управ;:сния, равному л/2), а слагаемое Ait. у - составляющую ЭДС преобразователя, равную падению напряжения в якорной цепи от тока нагрузки /яя.ц- Участки ав, ав\ аэ характеристики £. = /(0) могут бьпъ построены с использованием формул (2-24), в которых надо полагать £t,п - - опчч На рис. 2-9 в качестве примера показана кривая зависимости нормированного токз в прерывистом режиме от угла а для £д = О в пресрбраователе, выполненном по трехфазной мостовой схеме [16J. Обозначено /* = /я Определяя значения / и умножая их на R, можно построить участок характеристики а в . При таком расчете бует допускаться определенная погрешность, связанная с тем, что ciiMH формулы (2-24) выведены без учета R.a- 2-1-5. РЕВЕРСИВНЫЙ ТП Для построения реверсивлого преобразователя используюгся две группы тиристоров, Прн совместном управлении группами две системы управляющих импульсов, сдвинутые друг относительно друга, подаются каждая на свою группу тиристоров. Это обусловливает одиовремеиную работу обеих групп и наличие уравнительного тока. При согласованном совместном управлении и прн пренебпе-жении малым значением падения напряжения в тиристорах At/ требование н соог-ношению между углами управления первой ctj и второй ctj, групп получае1ся в виде a(180°-a,t. (2-27) В большинстве схем с согласованным совместным управлением уравнительный ток носит начально-непрерывный характер и его наличие исключает воа* можносгь Боэкнкиовення в преобразователе режима прерывистого тока даже прн самых малых нагрузках. Внешняя характеристика преобразователя практически имеет прямолинейный характер, и реверсивный преобразователь может быть представлен как эквивалентный источник, обладаннций двусгоронней проводимостью, с ЭДС Ет, пт cos а и внутренним сопротивлением ?х, п. определенным так же, как в нереверсивной схеме. 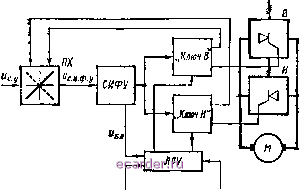 Задание иаправления тона Рис. 2-10 При использовании раздельного управления группами тиристоров реверсивного преобразователя исключение уравнительного тока обеспечивается тем, что управляющие импульсы поступают всегда только на одну из rpyim. Одна нз возможных схем управления реверсивным преобразователем, в которой применен один комплект СНФУ, подключаемый к группе тиристоров Вперед (В) или Назад (И), показана на рис. 2-10, Подача импульсов с СИФУ на ту нли иную группу тиристоров осуществляется с помощью электронных ключей Ключ В или Жлюч И , причем возможность их одновременного -включения исклЕочена. Логическое переключающее устройство {ЛПУ) дает команду на отключение работавшего и включение другого ключа в зависимости ог сигнала задания направления тока. Однако команда на переключение ключей проходит лишь тогда, когда тиристор, через который протекал ток, выключится, что контролируется датчиков проводимости тиристоров (ДПТ) по значению падения напряжения на тиристорах, и кга-да импульсы с группы, ротавшен до комагЕДы на изменение иаправления тока сняты. Это сигнализируется блокирующим напряжением йл-Сшнал задания налравлення тока может поступать, например, с выхода регулятора скорости системы с подчиненным токовым контуром (см. п. 2-2-2J. Отсутствие уравнительного тока (а также тенденция к созданию электродвигателей, рассчитанных на повышенный уровень пульсаций тока якоря, что позволяет уменьшить индуктивность сглаживающего дросселя) приводит к тому, что индуктивность якорной цепи оказывается меньшей, чем в приводе с превбра-здаателем, нммощим совместное управление группами. Поэтому сказанное выше о выборе а яч и виде регулировочных характеристик при работе с прерывистыми токами справедливо для каждой из групп тиристоров реверсивного преобразователя, 1з.чен€ние 1аправлення тока якоря связано с тереходом двигателя в режим рекуперативного торможения. Переключение групп тиристоров произойдет в тог ыомент, когда ток якоря станет равным нулю, а ЭДС преобразователя и двигателя будут равны друг другу. Перехсд в тормозной режим произойдет без броска якорного тока, если ЭДС включаемой группы, которая в период торможения будет работать в ннверторном режиме, была равна ЭДС отключаемой группы и двнга- теля. Это будет обеспечено, если одновременно с переключением ключей полярность сигнала на входе СИФУ будет изменена на противоположную. Для этой цели служит переключатель характеристик Регулировочные характеристики рассматриваемого преобразсдаателя для трех значений ЭДС двигателя Яд приведены иа рис. 2-11. Рассмотрим несколько упрощенную картину реверса тока якоря двигателя, работавшего в условном направлении Вперед , Пусгь ТП работает в ючхе а при напряжении на входе ПХ и. yi н равном ему по значению и соответствующем по знаку напряжении Uc.h.dj-y ЭДС двигателя равна Е, и предполагается, что за время реверса тока она не успеет измениться. Когда дается команда на реверс, Uc.y начинает уменьшаться, но Ключ В отключится только тогда, когда при £т-п = д1 ток станет равным нулю. После этого с выдержкой времени включится Ключ Н>. Одновременно изменится полярность на выходе ПХ и сигнал на ъхоА&СИФУ станет равным с, и, ф,у - - су-В дальнейшем, по мере торможения дви1а-теля и разгона его в условном направлении Назад , Ис.у будет продолжать уменьшаться, а затем поменяет знак, В установившемся режиме знак и.у будет противоположен тому, который был до начала реверса, а знак Ис. и.ф. у*орзнится прежним, что будет соответствовать выпрямительному режиму группы тиристоров Н. 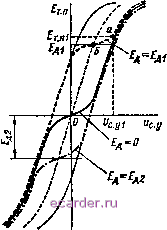 Рис, 2-й 2-1-6. ДИНАМИЧЕСКИЕ СВОЙСТВА ТИРИСТОРНОГО ЭЛЕКТРОПРИВОДА В соответствии с [54] динамика ТП характеризуется двумя его основ!1ымй особенностями как элемента системы управления: 1) поскольку в системе импульс-ио-фазового управления аналоговый входной сигнал дискретно преобразуется в сдвиг управляющих импульсов, преобразователь управляегся не непрерывно, а дискретно; 2) преобразователь представляет собой полууправляемое устройство - тиристор открывается в момент подачи управляющего импульса, а закрывается только тогда, когда ток через него станет равным нулю. Таким образом, ТП проявляет себя как существенно нелинейное звено, полоса пропускания которого ограниченна и характер переходного процесса в котором зависит от значения и знака входного сигнала, а также от момента подачи этого сигнала внутри периода напряжения питания. Нелииейносгь преобразователя может явиться причиной ряда специфических явлений, таких, как пояале-пие инзкочаст01ных биений прн воздействии на преобразователь сигналов с частотой, бачьшей частоты питания, возможность воз£1икновения субгармонических колебаний в замкнутых системах при попытках реализовать высокое быстродействие, появление постоянной составляющей ЭДС при воздействии гармонического сигнала высокой частоты и т. п. Все эти явления нежелательны и в правильно построенной системе тиристорного электропривода должны быть исключены, В большинстве случаев этого удается добиться, если скорость изменения сигнала на вхсде ТП ограниченна. В [54] приводится максимальное значение скорости изменения входного сигнала, при котором можно считать, что пере-хсщпые процессы при уменьшении и увеличении входного сигнала оказываются практически одинак<тымн: da (О \<л или da (О где ы - круговая частота напряжения питания. 52 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 [16] 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |