
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 [19] 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 2-2-2. УПРАВЛЕНИЕ ЭЛЕНТРОПРИВОДОМ В СИСТЕМЕ С ПОДЧИНЕННЫМ ТОКОВЫМ КОНТУРОМ Схема системы управления скоростью двигателя за счет регулирования напряжения на якоре при наличии подчиненного токового контура (рис. 2-13, а) находит сегодня самое широкое распространение. Токовый контур включает в себя регулятор тока {РТ}, 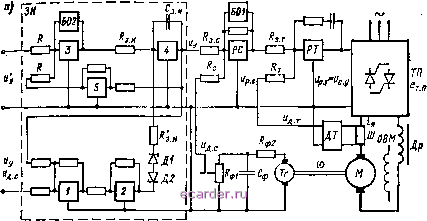 %.г{р) Аап.т Аар.т у] А\п -1 Рнс 2-13 На его входные сопротивления и подаются сигналы задания тока якоря р.(. с регулятора внешнего контура скорости и датчика тока {ДТ) Ыд,т. Назначенпем ДТ, включенного иа шунт ZZ/, является преобразование тока якоря в пропорциональное ему напряжение, соответствующее уровню стандартного напряжения элементов системы управления, а также гальваническая развязка якорной цепн двигателя н цепей управления. Выходное напряжение РТ подано на систему управления ТП. Благодаря применению блока / ограничения {БО) выходное напряжение регулятора скоростн (PC) не может превысить значения f/p.corp- Этим достигается ограничение тока якоря иа заданном уровне. Рассмотрим режим пуска, предпачагая пока, что задатчика иитенсивностн (ЗЯ) нет и njCK осуществляется подачей на вход PC напряжентгя у, значение которого Uy определяет заданный уровень скорости *. Под действием большого входного сигнала на выходе PC сразу устанавливается напряжение Ир.с = f/p.c.ocp - - const и коэффициент усиления PC становится равным нулю, т. е. контур скорости размыкается. Поскольку р.с является задающим сигналомдляконтуратока.токякоря /я.макс бОЛЬШНЙТОКа, соответствующего моменту нагрузки М, поддерживается примерно постоянным. При Л1с - const это соответствует разгону двигателя с постоянным ускорением. В этот период пуска для входных цепей регулятора тока можно записать -0. (2-31) где i/a.T. flKc = д.т h иак; /я.иакс максимальио допустимын ток в переходных режимах; д.т - передаточный коэффициент датчика тока, вычисленный как отношение напряжения на выходе ДТ к соответствующему ему значению якорного тока. По мере разгона двигателя напряжение тахогенератора д. с = = k ей) растет и, когда оно достигнет значения, близкого к определяемому равенством -0. . (2-32) регулятор скорости выйдет из ограничения. Вследствие еще продолжающегося увеличения скорости напряжение и ток якоря будут уменьшаться. Установившееся состояние, к которому придет система, будет характеризоваться значением Wp.t которое соответствует данному току нагрузки. Система в любом режиме будет ограничивать якорный ток значением /fl.MaKct которое может быть превышено только в первый момент после ограничения PC за счет переходного процесса в токовом контуре. За счет действия токового контура система быстро отрабатывает возмущения в виде изменений напряжения сети. Если напряжение сети изменится скачком, то в первый момент так же изменится и ЭДС ТП. Это приведет к изменению якорного тока, и лишь затем начнет изменяться скорость, Регулятор тока будет восстанавливать ток за счет воздействия на ТП. Если быстродействие токового контура велико, прежнее значение тока будет быстро восстановлено за счет изменения напряжения с.у на входе ТП и отклонение скорости вследствие изменения напряжения сети будет небольшим. Примерные равенства (2-31) и (2-32) могут быть использованы для определения соотношений между внешними входными сопро- * Предполагается, что входные цепи PC защищены от протекания недопустимо большого входного тока. тивлениями РТ и PC, если известны /я.макс и Шуст и cooTetctByro-шие им значения L/p. гр и 1/у. При описании настройки автоматической системы управления будем считать, что ток якоря непрерывный, а входные воздействия достаточно малы, благодаря чему при рассмотрении структурной схемы системы можно воспользоваться линеаризованным описанием двигателя и считать, что выходное напряжение регулятора скорости, а следовательно, и ток якоря не ограничиваются (рис. 2-13, б). Структура двигателя изображена в соответствии с выражениями (2-6) н (2-7) при СдФ = СдФн = Сд. Тиристориый преобразователь, датчик тока и тахогенератор с фильтром представлены апериодическими звеньями с соответствующими коэффициентами передачи и постоянными времени. Нетрудно видеть, что основное отличие рассматриваеьюй схемы от схемы рис. I-I3, в, поясняющей принцип подчиненного регулирования, состоит в том, что на вход звеиа 1/[Ря.ц (Тя + I)], представляющего собой объект внутреннего контура, действует сигнал обратной связи по ЭДС двигателя Дд. Положив ДЯф = О и ДЛ1с = О и перенося точку а с выхода контура скорости иа выход контура тока, можно записать передаточную фуикцию образовавшегося в токовом контуре объекта с прямым каналом 1 ДРя.ц (7н.цР+ -f I)] и каналом обратной связи (-1) {cjJ/iJp) в виде где Л (р) = Тр {Т, р -f 1)/[Г, р (Т цО + 1) + и - сомножитель, отражающий влияние обратной связи по ЭДС; Тд ~ = ./Ря.ц/(сд) - электромеханическая постоянная времени привода. Передаточная функция разомкнутого токового контура будет тогда иметь вид (р) = ,(р)(г, р+1иг;..р+1) д.. (Г.. р + 1) Если для настройки на ОМ использовать ЯЯ-регулятор тока на базе операционнбго усилителя с высоким коэффициентом усиления, выбрав где малая постоянная времени токового контура есть Tpj = Т. -f + Тд, можно записать: Wi{p)==wnp)Aip). (2-34) Здесь I Wr (Р) = 2Г,р(7-,рР+1)(Гд.+1) <2-35) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 [19] 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |