
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 [25] 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 в быстродействующих приводах применяют иногда упреждающее токоограничеиие совместно с подчиненным токовым контуром, возлагая на первое ограничение первого броска тока, а на токовый контур - ограничение тока в течение всего переходного процесса. 2-3-2, РЕГУЛИРОВАНИЕ УРАВНИТЕЛЬНОГО ТОКА В ТИРИСТОРНОМ ЭЛЕКТРОПРИВОДЕ ПРИ СОВМЕСТНОМ УПРАВЛЕНИИ ГРУППАМИ РЕВЕРСИВНОГО ТП Выше, при рассмотрении принципов построения систем управления тирнсторными электроприводами, предполагалось, что ТП работает в зоне непрерывных токов. Применительно к реверсивному электроприводу это означает, что используется совместное согласованное управление группами преобразователя, когда приращение напряжения Аис.у вызывает одинаковые по значению и разные по знаку приращения углов управления выпрямительной и ннверторной групп, соответствующие выражению (2-27). Уравнительный ток при этом поддерживается параметрически, т. е. непосредственно не контролируется. Существует опасность того, что из-за нестабильнссти параметров СИФУ илн нелинейности ее характеристик может возникнуть аварийный режим, при котором среднее значение ЭДС выпрямительной группы станет больше, чем ЭДС ннверторной группы, что приведет к резкому увеличению уравнительного тока. Чтобы избежать этого, приходится отступать от согласованного управления, делая ai > (180° - ан). Это приводит к нарушению линейности электроьехаицческой характеристики привода в зоне малых токов. В тех случаях, когда используется преобразователь с совместным управлением, а к линейности характеристик предъявляются особенно высокие требования или koi да мощность установки велика, а следовательно, велико и значение уравнительного тока, применяют двухканальиые системы управления, в которых предусматривается непосредственное регулирование уравнительного тока. Одна из таких схем [13, 38] показана иа рнс. 2-21, а. Регуляторы тока РТв и РТн воздействуют на системы управления группами тиристоров В и Н СИФУе и СИФУн. Контуры регулирования токов тиристорных групп замкнуты через датчики токов ДТв и ДТп. В зависимости от полярности Ир.с открыт диод Д1 илн Д2. Поэто.у на контур тока одной группы поступают сигналы задания тока нагрузки с регулятора скоростн PC и уравнительного тока с задат-чика уравнительного тока ЗУТ. На другой контур тока поступает только сигнал задания уравнительного тока i. При неизменном значении напряжения на выходе PC ток iy, поддерживается постоянным в соответствии с заданием с ЗУТ. При изменении задания скорости, когда напряжение PC меняется, наблюдается отклонение Уравнительного тока от заданного значения, связанное с тем, что изменение напряжения PC воздействует лишь на один канал регу-ЛИования тока. На рис. 2-1, б показана осциллограмма 138], иллюстрирующая реакцию системы на скачок напряжения PC при неподвижном двигателе. Ток iu группы В, работающей в выпрямительном ре,-жиме, на вход токового коитура которой поступил сигнал, возрастает В соответствии с настройкой контура. Поскольку сигнал лтРС Гц 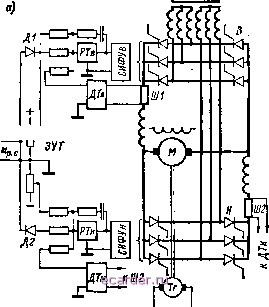 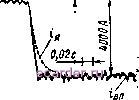 Рис. 2-21 на токовом контуре группы тиристоров Н не изменился (диод Д2 закрыт), возрастает разница между ЭДС групп В и Н, и уравнительный ток начинает расти, а затем возвращается к прежнему значению, соответствующему сигналу с ЗУТ. В результате ток двигателя, представляющий собой разность - (вп - *ур P стает медленнее, чем ток группы В. Для увеличения скорости нарастания тока двигателя до зиа-чення, соответствующего настройке на ОМ, увеличивают Рр. по сравнению со значением, определяемым выражением (2-33). При этом следует проверить характер изменения токов групп преобразователя, чтобы избежать недопустимых бросков токов при ступенчатом изменении Мр.с [13]. Для уменьшения бросков токов применяюг различные комбинации С-цепей иа входах токовых контуров. Простейшим решением, дающим значительный положительный эффект, является шунтирование диодов Д1 и Д2 конденсаторами, благодаря чему в переходном процессе на вход контура тока группы, подготовленной к инверторному режиму, поступает сигнал, представляющий собой в первом приближении производную от д,, что заставляет изменяться в нужном направлении угол управления тиристоров этой группы раньше, чем уравнительный ток успеет значительно измениться. 2-3-3. ЛИНЕАРИЗАЦИЯ ХАРАКТЕРИСТИК ТОКОВОГО КОНТУРА ПРИ ИСПОЛЬЗОВАНИИ ТП С РАЗДЕЛЬНЫМ УПРАВЛЕНИЕМ ГРУППАМИ ТИРИСТОРОВ В п. 2-1-4 отмечалось, что одной из особенностей электропривода с ТП, имеющим раздельное управление, является наличие значительной зоны прерывистых токов. Это вызывает трудности настройки токового контура, и может оказаться, что рассмотренные стандартные настройки контура реализовать не удастся. Есть три основных направления решения этой задачи: а) использование адаптивного регулятора тока (см. п. 9-2-4); б) создание подчиненного контура регулирования напряжения преобразователя ИЗ]; в) линеаризация статических характеристик путем компенсации нелинейности режима прерывистого тока (16]. Использование подчиненного контура регулирования напряжения позволяет линеаризовать характеристики объекта в токовом контуре за счет охвата ТП жесткой отрицательной обратной связью по напряжению. Для напряжения иа выходе преобразователя, работающего в режиме непрерывного тока, можно записать где ?т.п и L, - сопротивление н индуктивность ТП, если обратная связь по напряжению снимается непосредственно с его зажимов, или участка якорной цепи, охваченного связью. Приращение тока якоря при ДЛ - О можно определить как = - = ЖГr,.p(W4-l)-H - W 2 я.Ц S Я.Ц Подстановка этого выражения в формулу для Ди дает А т.п(р) Гэ.дР (Тв.ц.дР-Ь 1)4-1 Дг. (Р) ~ 7- Р(7я.цР-ь1)-Ы * где обозначено Передаточная функция контура напряжения (рис. 2-22 о) при -Условии представления ТП линейным звеном может быть записана 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 [25] 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |