
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 [26] 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 в внде Там дР(7 й ц + l где J, (р) - передаточная функция ТП; йр.ц (р) и д.н (р) - передаточные функции соответственно регулятора и датчика напряжения. 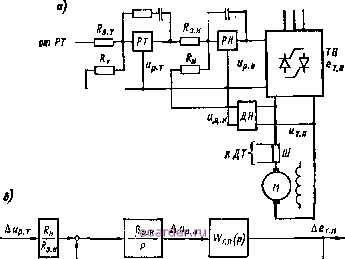 А.И
Обычно частота среза ЛАЧХ контура напряжения значительно выше сопрягаюшх частот ЛЛЧХ, соответствующей последнему сомножителю, н его влияние в области частоты среза можно оценить, рассматривая только высокочастотную часть соответствующей ЛАЧХ, т. е. полагать Тэц.лР (11. Ц. дР-Ь 1) ~Ь I дТя. и, д я. ц - т. п При практической настройке контура напряжения, стремясь получить максимальное его быстродействие, считаются с тем фактом, что ТП в рассматриваемой зоне частот уже нельзя onncatb апериодическим звеном. Прн безынерционном датчике напряжения, когда ид.н (р) = 1.11. и отсутствии фильтра на входе СИФУ единственной величиной, определяющей малую постоянной времени В контурС: является запаздывание самого преобразователя. Для того чтобы избежать автоколебаний, связанных с особенностями ТП как нелинейного звена, рекомендуется [131 выбирать расчетное значение малой постоянной времени контура напряжения с учетом неравенства 2TJ 1 /(2ш/). Тогда для настройки на ОМ в соответствии с (1-И) надо применить интегрирующий регулятор напряжения (РЩ с передаточной функцией Wp, (р) = pJp при Рр. = =.1 /(2Tiuft.пд.н t ) Соответствующая структурная схема приведена на рис, 2-22, б. При переходе в зону прерывистых токов переходные процессы оказываются сильно отличающимися от стандартных. Это объясняется снижением передаточного коэффициента ТП (см. рис. 2-8, б), отсутствием влияния постоянной времени якорной цепн, возрастанием электромеханической постоянной, связанным с увеличением крутизны внешней характеристики преобразователя. Быстродействие контура напряжения при этом снижается, а колебательность растет. Тем. не менее рассмотретгаая настройка оказывается обычно приемлемой и при рассмотрении контура тока можно в первом приближении заменить ТП, охваченный обратной связью по напряжению, передаточной функцией линейного звена где Ту = 2Tu - эквивалентная постоянная времени замкнутого контура; RalPs.a - соотношение входных сопротивлений РН. Прн линеаризации характеристик токового контура путем компенсации нелинейности ТП в режиме прерывистого тока в контур тока включается нелинейное звено с обратной нелинейностью. Характер нелинейности ТП был рассмотрен в п. 2-1-4 (см. рнс. 2-8, 2-11). Было показано, что суммарный сигнал на входе СИФУ можно считать состоящим из двух частей: иу, обеспечивающей ЭДС преобразователя, равную ЭДС двигателя, и Аи.у, обеспечивающей ЭДС преобразователя, равную падению напряжения в якорной цепи от якорного тока. С учетом этого может быть реализован следующий принцип построения системы: за счет напряжения регулятора тока на входе СИФУ формируется только составляющая напряжения управления Дн.у задающая падение напряжения от тока нагрузки, а составляющая и.у, определяемая на основании выражения для ЭДС ТП при непрерывном токе как Uc.y = -~- arcsin F аддится на вход СИФУ от отдельного источника сигнала. Зависимость (/д ц = / (Л с у) нелинейна. Для линеаризации контура тока в него надо ввести нелинейное звено с обратной статической характеристикой. Зависимость я/я.ц = / (Д с.у) в данной схеме однозначно определяется зависимостью URa.a = / (ot), подстроение которой описано в п. 2-1-4. Характер зависимости Гя = / (а) 81 оказывается различным при различных значениях Сд, т. е. компенсирующее нелинейное звеио должно было бы перестраиваться в зависимости от значения ЭДС дангателя. Однако опыт показывает 116], что удовлетворительный резульь тат получается и в том случае, если корректирующее нелинейное звено настроить на компенсацию зависимости гя/?я,ц = / (А с.у) при = 0. В реверсивной схеме она имеет вид рнс. 2-23, а. Структура части токового конт>ра с компенсацией статической нелинейности, вызванной наличием зоны прерывистого тока, показана на рнс. 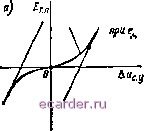 3-> 9тАТ огТг Рис. 2-23 2-23, б. Нелинейное компенсирующее звено H3i включено на выход регулятора тока. Звено И32 обеспечивает арксинусную зависимость напряжения /4 у от напряжения тахогенератора, пропорционального ЭДС двигателя. При настройке регулятора тока можно определять передаточный коэффициент ТП в рабочей точке характеристики £т.л = / ( с.у)> построенной для режима непрерывного тока. ГЛАВА ТРЕТЬЯ АВТОМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ СКОРОСТЬЮ ЭЛЕКТРОПРИВОДОВ ПЕРЕМЕННОГО ТОКА Развитие полупроводниковой преобразовательной техники привело к широкому использованию электроприводов с электродвигателями переменного тока, к созданию новых систем управления этими электродвигателями. По сравнению с системами управления электроприводами постоянного тока системы управления электроприводами переменного тока значительно более разнообразны. В регулируемых электроприводах используются асинхронные электродвигатели с короткозамкнутым или фазным ротором, синхроит 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 [26] 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |
||||||||||||||