
|
| |
|
Слаботочка Книги 1 2 [3] 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 Наконец, наиболее общим принципом проектирования при поиске новых решений является непосредственный синтез систем управления. Сущность его заключается в том, что проектировщик по известной модели объекта управления и заданной целевой функции специальными методами синтеза определяет структуру, характеристики, численные значения параметров системы и виды сторонних функциональных воздействий. Свобода действий проектировищка обычно ограничена. Чаще всего встречаются параметрические ограничения, связанные с тем, что при выборе какого-либо элемента системы проектировщик вынужден считаться с заданным диапазоном возможных изменений его параметров. Примером могут служить ограничения, связанные с конечностью коэффициентов усиления, наличием постоянных времени и т. п. Не менее часто приходится иметь дело с функциональными ограничениями, обусловленными тем, что предельные значения выходных переменных элементов системы ограниченны. Примером могут служить насыщение магнитной системы электрической машины, ограничение выходного напряжения операционного усилителя и т. п. приходится также учитывать энергетические возможности ряда элементов, т. е. ограничения по потребляемой илч выделяе\юй энергии, а также по запасу энергии. С одной стороны, энергетические ограничения характеризуют значение потребляемой или отдаваемой мощности элементов, с другой - их эксплуатационную надежность н работоспособность. Наконец, следует иметь в виду н инфорл!ационные ограничения, закл!очающиеся в том, что не все переменные процесса, интересующие проектировщика, могуг быть измерены или наблюдаемы. Упомянутые выше основные ограничения в зависимости от характера поставлшной задачи определяют также и выбор рационального метода исследования. При проектировании приходится решать как линейные, так и нелинейные задачи, использовать ручные и машинные методы проектирования, расчета и исследований, выбирать наиболее приемлемые для решаемой задачи алгоритмы синтеза н анализа системы. 1-2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ АСУ ЭП t-2-l. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ НЕЛИНЕЙНЫХ АСУ ЭП И ИХ ЛИНЕАРИЗАЦИЯ Для того чтобы исследовать автоматическою систему управления, н в частности АСУ ЭП, необходимо располагать ее атематически м описанием, т е системой дифференциальных уравнений, характеризующих зависичостн координат системы от внешних воздействий и друг от друга. В частном случае, когда производные по времени от координат равны нулю, эти уравнения обращаются в алгебраические, описывающие статику системы Наиболее распространенными способами математического описания, используемыми при проектировании и исследовании АСУ ЭП, являются- дифференциальные уравнения, записываемые в той или иной форме, структурные схемы, являющиеся графической интерпретацией дифференциальных уравнений; мат- рнчные структурные схемы, находящие в нестоящее время наибольшее распространение прн описании линеаризованных систем. Описание системы в влде дифференцнау1ьных уравнений в нормальной форие Коши позволяет п[вдставить CTpvKiypHjro схему системы в виде ряда связанных между собой элементарных интегрирующих звеньев (3]. В нелинейной системе коэффициенты дифференциальных уравнений непостоянны в могут быть либо функциями времени, что в системах электропривода встречается сравнительно редко, либо, как это бывает чаще, представлять собой функции переменных (координат) системы. На элементарное Звено могут воздействовать также функции произведения внешних входных воздействий или переменных системы. С учетом сказанного для элементарного k-vo звена можно записать где fi - инерционный коэффициент, который характеризует элементарное звено и в общем случае может быть переменным; - производная от переменной на выходе рассматриваемого k-то звена; Sf (х,) - сучма воздействий, линейно или нелинейно зависящих от внешних воздействий или переменных системы, в том числе и от переменной х; (х/X Xq)-сумма воздействий, зависящих от произведения внешних воздействий или переменных. Ограничив для конкретности число входов и полагая, что S F {Xt) = F (ti) -F (Xk) = -Jfo,с; 1:F (Xj X Xg) = xs (где xj, Xr, Xg - некоторые входные воздействия илн переменные системы; F (х/) - входной сигнал, нелинейно зависящий от Xi; F {х) - сигнал нелинейной обратной связи, охватывающий рассиатривасше зшемектарное звено), а также считая, что, как Это бывает обычно, И* = const, структурную схему элементарного звена можно представить в виде рис. 1-3, а. На ней статические характеристики нелинейных связей F (xi) и F (х) представлены графически. В установившемся режиме результирующий входной сигнал на интеграторе равен нулю, т. е. х = Координаты XI, Xk, Хг, Xg, Ло. с представляют собой физические величин!, например напряжение, ток, скорость и т. п. Это удобно, так как значения, фигу-рирукнцие в математическом описании, равны значениям реальных физических величин. Однако при рассмотрении сложных автоматических систем большое число размерных коэффициентов часто делает структурную схему громоздкой, затрудняет ее понимание. В тех случаях, когда основной задачей является комплексное исследование сложной системы, структурную схему можно упростить за счет перехода к относительным величинам, т. е. применить нормирование. Под величиной в относительных единицах (о. е.) понимают отношение некоторой величины л к ее базовому значению Х, за которое принимают обычно значение в наиболее характерном устаповившгчся режиме. Если в рассматриваемой схеме за базовое значение Xh принять g, то базовым значением сигнала обратной связи Хо.с.6 1здо выбрать значение, соответствующее б> характеристике обратной связи. Это же значение целесообразно выбрать базовым для входных величин x,fi~ F (xi) и х = д:. Тогда Xiq определится по статической характеристике связи, как показано на рнс. 1-3, а, а определение базовых значений и Xjб дачжио быть произведено из равенства Хб-й -о-с б, причем одно из базовых значений может быть выбрано произвотьно. Структурная схема в о. е. будет иметь вид рис. 1-3, б. Характеристики нелинейных связей в о, е. получены из исходных путем деления значений, отложенных по осям координат, на соответствующие базовые значения. Постоянный коэффициент Firi АнХ,;бХо.с.б имеющий размерность времени и зависящий от выбора базовых значений величин на входе и аыходе мементарного звена, называется базовой постоянной сременн Щ. Базовая постоянная времени может быть определена так называемым инте-гральным методом. В соответствии со структурной схемой в о. е. можно записать Если рассматривать переходный процесс, в котором выходная переченнзя изменяется от О до I (в абсолютных единицах - от нуля до базового значения), то в результате интегрирования этого выражения получается ] 00 откуда Если и Xq.c представляют собой электрические напря:жения или являются физическими величинами, которые могут быть преобразованы в н)пря <сьия> 1о с покощью интегратора легко реализуется схема для определения 7 * б го измеренным входному сигналу и сигналу обратной связи. 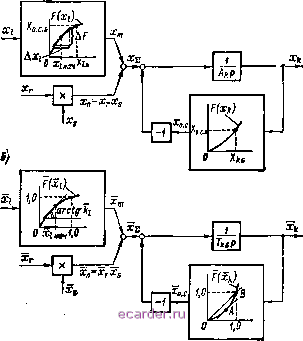 Рис. 1-3 Многие системы, в частности системы стабилизации, работают при некотором определенном для данного режима значении регулируемой координаты. Это позволяет произвести линеаризацию системы известным из теории автоматического управления способом, когда переходят к приращениям координат, используют Коэффициенты передачи зшементов, определенные в рабочей точке, и заменяют произведения приращений переменных их суммой. Так, а схеме рис. 1-3, 6 коор- 1 2 [3] 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |