
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [30] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 (ДЛ1,/М ф ) - ДЛ?с. (Д 1а/101р) = Акх. Передаточная функ-цня (3-37) с учетом (3-39) запишется так: ДД1 (Р) (у uui(p)--Дш О?) \ V где Y lalxaaотносительноб напряжение статора; = QjQia - относительная частота напряжения статора. Илн в упрощенном виде: (3-41; ДУ? (Р) , V Y Д Й1 (р) Соответственно иа основании уравнения (3-40) имеем До) (р) I Д.11(р)-Д51с(р) ~ (3-42) (3-43) где Т - JQol/Лln,ф,i, - механическая постоянная времени двигателя. Упрощенная структурная схема асинхронного двигателя при управлении угловой частотой напряжения статора, построенная на основании выражений (3-42), (3-43), показана на рис. 3-1. Используя изложенный выше подход к выводу передаточных функций двигателя, можно получить передаточную функцию, связывающую изменение электромагнитного момента двигателя ДМ при изменении напряжения статора Ahi. и неизменной частоте напряжения статора (o>i = const). Этот случай соответствует изменяющемуся потокосцеплению статора. В о. е. получим Рис. 3-1 Д/П (р) Дйш (Р) S2(7.>,p4-2)--v(J-)% (Гэ.,РЧ-1) (3-44) где 5 - абсолютное скольжение электродвигателя в рабочей точке, равное отношению угловой частоты ЭДС ротора (приведенной к двухполюсному электродвигателю) к номинальному значению угловой частоты напряжения статора Йщ: 5.= i Siiii Подробный вывод передаточной функции (3-44) изложен в работе (571. >т Структурная схема асинхронного электродвигателя прн управлении напряжением статора показана на рис. 3-2. При построении систем управления асинхронным электродвигателем часто оказывается целесообразным использовать информацию о токе статора или ротора. В связи с этим полную структурную схему асинхронного электродвигателя, объединяющую частные случаи управления, рассмотренные выше, целесообразно представить с выделенными ± Рис. 3-2 приращениями токов и Aiaa относительно начальных значений и /га. Такая структурная схема показана на рис. 3-3 (58]. Дополнительно к ранее принятым обозначениям на рис. 3-3 обозначено через Alia = Afia/Лан.р относительное приращение активного тока в обмотке статора, где /iH p - активный ток в обмотке статора Aw-i (rs.P-4ifp4 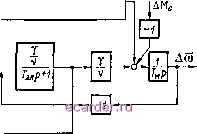 Рис. 3-3 при номинальном напряжении, номинальной частоте и неподвижном роторе. С учетом принятых допущепнй справедливо приближенное равенство Ah ,At\ , (3-45) где 2и = Ai2-x/T2mi.p - относительное приращение активного тока ротора; 12га.р - активный ток в обмотке неподвижного ротора при номинальном напряжении и номинальной частоте напряжения статора. в передаточных функциях двигателя присутствует колебательное звено 1/ + . Частота колебаний согласуется с угловой частотой напряжения статора Qi и, следовательно, зависит от выбора рабочей точки. Если учесть сопротивление обмотки статора (которое при исследовании динамики двигателя принято равным нулю), то вместо чисто колебательного звена будет демпфи рева иное колебательное звено. Это обстоятельство подтверждается и экспериментальными исследованиядги динамических характеристик частотно-регулируемых электроприводов. 3-1-2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПРИ УПРАВЛЕНИИ СО СТОРОНЫ РОТОРА Введение в каждую из фаз ротора добавочной ЭДС, согласованной по частоте, амплитуде и фазе с ЭДС ротора, может обеспечить экономичное регулирование скорости двигателя выше и ниже синхронной скорости. Принцип управления может быть упрощенно пояснен, если рассматривать только роторную цепь асинхронного двигателя. Предполагая, что в режиме холостого хода в каждую фазу ротора введена добавочная ЭДС вдов, находящаяся в прсугивофазе с основной ЭДС (г = EgS) и равная ей по значению, а также принимая во внимание, что 5 = I - (л/щг можно записать 2к j где Еа - номинальное значенне ЭДС на кольцах неподвижного ротора. Изменяя бдой от значения, равного Езв ДО нуля, можно изменять угловую скорость холостого хода двнгателя от нуля до Иов Если добавочная ЭДС включена в фазе с основной ЭДС ротора, то двигатель будет вращаться с угловой скоростью, большей синхронной скорости (Оон- Регулирование скорости от значений, меньших Он, до значений, больших носит назвзние двухтонного регулирования скорости. При увеличении нагрузки на валу двигателя скорость его снижается, скольжение возрастает и ЭДС ротора превосходит добавочную ЭДС. В роторной цепи появляется ток /а, определяемый результируюшйй ЭДС = еб и полным conptb тивлеинем цепи. С помощью добавочной ЭДС можно регулировать не только угловую скорость двигателя, но и реактивную мощность роторной цепи, а следовательно, и всего двигателя. С этой целью добавочную ЭДС вводят с некоторым фазовым углом к ЭДС ротора, i 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [30] 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |