
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 [33] 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 потпернода, когда напряжение на конденсаторе Q достигает максимума. Дальнейший процесс перезаряда конденсатора невозможен из-за наличия диода 8. При использсжании АИ с широтпо-импульсноЙ модуляцией можно суш,ест-венно снизить спектральный состав высшил гармонических за счет изменения скважности модуляции в процессе формирования полупериода выходного напряжения ТИ частоты и тем самым при&чнзиться к синусоидальной форме этого напряжения. Недостатком рассмотренного ТП частоты явтяется относительная сложность и большое число элементов из-за наличия блоков коммутации. AU Ait, Рис. 3-7 Рассматривая динамику двигателя переменного тока, работающего от преобразователя частоты, следует рассматривать электромагнитные процессы в дви гателе с учетом электромагнитных процессов в инверторе. Наличие большого числа различных цепей в инверторе, переключающихся олиовременгю с переключением тиристоре , оказывает определенное влияиие на формирование электромагнитного момента двигателя. Однако учет динамических процессов в периодически переключающихся электромагнитных цепях совместно с динамическими 1[роцессами в двигателе является сложным, и часю в этом не возникает необходимости в связи с ограниченным спектром формирования управляющих воздейсг-внй на Г1рео5разователь частоты в замкнутых системах управления. При исследовакни динамики могут быть учтены в параметрах статорпой цепи асинхронных электродвигателей приведенные параметры АИ напряжения точно так же, как это делается в электроприводах постоянного тока, когда параметры выпрямителя приводягся к параметрам якорЮЙ цепи электродвигателя. Наряду с этим в структуре ТП частоты имеется сглаживающий фильтр, сущест-ценно влиякмций на динамику системы В соответствии с эквивалентной схемой цепи выпрямитель-фильтр (рис. 3-7, а) можно записать основные уравнения дина.микн такой цепи в приращениях координат относительно начальных 3[ia-чений: Asa = R, Ai,-L,- + Au,; d Auq (3-56) где te ~ приращение ЭДС выпрянителя; Ai , Д/, Ain - приратенне токов и Цепях выпрямителя, конденсатора Со и инвертора; Lg, - эквивалентные индуктивность и сопротивление выпрямителя совместно с дросселем Др1; Ащ - прира[цение напряжения питания АИ. Переходя к операторной форме записи уравнений (3-56) и пыполнив через коэффициенты ксп й krz согласование переменных Дн н Д/и с переменными И) и которые ранее рассматривались при исследовании динамики & асин- хронном электродвигателе, можно получить упрощенную стр\ктурную схему Электромагнитной цепи ТП частоты, работающего на электродвигатель (рис. 3-7,6). В Соответствии с этой структурной схемой и структурной схемой электродвига-1еля д 7я случая одновременного пропорционального управления напряжением и Частигой ннвершра (см. рис. 3-3), а также предполагая отсутсгвие влияния нагрузки на выходное напряжение инвертора и пренебрегая инерционностью электромагнитной цепи электродвигателя, можно получить общую структурную схему электродвигателя совместно с преобразователем частоты (рис. 3-8). Динамические свойства выпрямителя по управляющему воздействию учтены инерционным звеном Ав/(вР + 1)> г-дев и Гя - передаточный коэффициент и постоянная времени выпрямителя. Аналогично могут быть учтены и динамические свойства А И Ai34- Aif* Рис. 3-8 гл ш 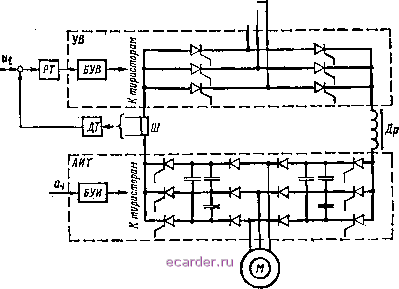 Рнс. 3-9 no Управляющему воздействию, однако они являются неоднозначными при широком диапазоне регулирования частоты, В области низких частот могут 1]аблю-даться значительные запаздывания в АИ при отработке управляющих воздействий, что сущестаенио снижает динамические свойства систем управления, если тьормирование активных воздействий на электропривод идет по каналу регулирования частоты. Дпя электроприводов, работающих в области низких частот, рационально применять АИ с широтно-импульсиой модуляцией либо 7П частоты с непосредственной связью. При частотно-токовсяи управлении электроприводами переменного тока в ТП Тчастоты применяются автономные инверторы тока (АИТ). В отличие от автономных инверторов напряжения {АИН) в АИТ происходит формирование переменного по частоте тока даигателя. Для питания инвертора постоянным током можно применить стабилизатор тока, выпачненнын на базе УВ. Схема ТП частоты с АИТ показана на рис. 3-9. Реализация системы стабилизации тока и ее расчет аналогичны тем, что были рассмотрены в АСУ ЭП постоянного тока прк использовании подчиненной обратной связи по току. Инверторы тока технически реализуются проще инверторов напряжения, так как в них отсутствует возвратный диодный мост, Кроме того, в ТП частоты с АИТ возможна рекуперация энергии в сеть, что важно в электроприводах, работающих а псвторно-кратковременных режимах работы. При работе электродвигателя в генераторном режиме направление постоя]нюго тока не меняется. В замкнутых системах УВ автоматически переходит в инверторный режим и обеспечивает рекуперацию энергии в сеть. Для организации рекуперативных режимов работы электропривода с АИН необходимо применять реверсивные выпрямители. Недостатком АИТ является необходимость в их значительном усложнении при формировании токов двигателя, близких к синусоидальным. При использовании АИТ по схеме рис. 3-9 наблюдаются сугцественные потери мощности и формируются дополнительные возмущающие моменты в электродвигателе, вызывающие колебания скорости. 3-2-2. ТП ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ Упрощенная схема свлсщ(й части трехфазного ТП частоты с неносредствен-ной связью показана иа рис. 3-10. Группы тирист)ов одной фазы двигателя (на рисунке обведены штриховой линией) соединены по встречно-лараллельной схеме и, по существу, аналогичны схемам реверсивных управляемых выпрямителей, используемых в электроприводах постоянного тока. Каждая из половин периодического выходного напряжения ТП формируется соответствующей группой тиристоров: например, натожительная пачуволна - группой /, отрицательная - группой . Выходное периодическое напряжение может иметь синусоидальную или прямоугольную форму. При прямоугмьной форме выходного напряжения спектр и амплитуда высших гармоник на выходе тП будет больше, чем при синусоида л ьнрй форме, что приводит к некоторому уменьшению КПД двигателя и появлению возмущающих воздей-ствий в системе электропривода. Однако достоинство ТП частоты с прямоуюльной формой напряжения - несколько больший коэффициент мощности, чем у ТП с синусоидальным выходным напряжением. Принпнпы управления группами тиристоров в ТП частоты могут быть различными, так же как и в реверсивных выпрямителях. При согласованнсш управлении управляющие импульсы пс-ступают одновременно н на группу /, работающую, например, в выпрямительном режиме, и на группу , работающую в ннверторном режиме, Прн этол1 соблюдается равенство средних значений напряжений групп тиристоров. Уравнительный ток между группами / и , вызванный неравенством мгновенных значений напряжений, ограничивается уравнительными реакторами УР1~УР6. Возможно и раздельное управление группами тиристоров. При котором в момент перехода тока нагрузки через нуль специальное переключающее устройство снимает управляющие импульсы с тиристоров той группы, через которую до этого момента протекал ток нагрузки, и подает импульсы на тиристоры группы, вступающей в работу. В этом случае уравнительные токи отсутствуют и уравнительные реакторы могут быть из схемы исключены. Динамические свойства ТП частоты с пепосредственной связью в основной Соответствуют динамическим свойствам реверсивных УВ, н к ним применимы основыые положения динамики реверсивных УВ, изложенные в гл. 2. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 [33] 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |