
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 [34] 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 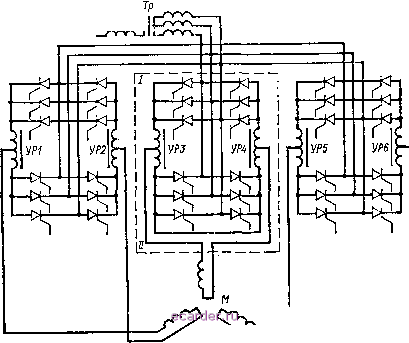 Рис, 3 io 3-2-3. ТП в РОТОРНЫХ ЦЕПЯХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ Тнристорные преобразователи включаюгся в роторную цепь для реализации двух основных способов управления асинхронными электродвигателями: управления добавочной ЭДС и управления добавочным сопротивлением с помощью широтно-импульсного модулятора. Силовая часть систем асинхронных электроприводов, управляемых добавочной ЭДС в цепи ротора, может быть различной в зависимости от типов применяемых ТП частоты, способов управления и включения нх в роторную цепь. Эти электроприводы получили название асипхронпо-вентильных каскадов (АВК) 131]. Для управления электродвигателями могут использоваться ТП частоты со звеном постоянного тока и с непосредственной связью. При реализации двухзонного регулирования скорости ТП частоты с непосредственной связью обладают некоторыми преимуществами по установленной мощности оборудования и простоте реализации. Схема включеЕшя в цепь ротора асинхронного двигателя ТП частоты с непосредственной связью, выполненного на основе трехфазной схе\]Ы с нулевой точкой, показана на рис. 3-П, й. Поясним особенности работы ТП частоты в схеме АВК, Когда угловая скорость ротора меньше скорости, соответствующей есгест-pcHHofi характеристике каскада, группы тиристоров отпираются в такой последовательности и с такой частотой, что обеспечивается встречное включение добавочной ЭДС и ЭДС ротора. Причем относительно питающей сети группы тиристоров работают в инверторном режиме, инвертир\я ток ротора часто1ы скольжения в переменный ток частоты сети: тиристоры групп /, , / открываются при отрицательных напряжениях сети на анодах, а групп !V, V, К/ - при положительных напряжениях сети на катодах, При угловой скорости ротора выше ско- ncTir соответствующей естественной характеристике каскада, но ниже синхронной добавочная ЭДС должна совпадать по направлению с ЭДС ротора, поэтому тиристоры групп /, , / открываются прн положительных напряжениях сети на анодах, а групп iv, v, iv - при отрицательных напряжениях на катодах. При синхронной скорости роюра три группы тиристоров, принадлежащие различным фазам ротора, включаются на работу в выпрямительном режвме и обмотки ротора питаются постоянным током. Механические характеристики такого привода имеют вид, примерно соотеетствующий механическим характеристикам нривода при частотном упразлеиии двигателей по цепи статора. С точки зрения технической реализации плавное регулирование скорости в районе синхронной скорости оказывается не простым. Наблюдается некоторая ступенчатость регулирования. 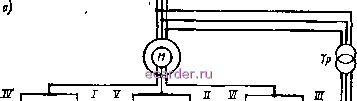 ® ч> Рис. 3-11 Если регулирование скорости электродвигателя ограничено диапазоном вниз от основной скорости и не ставятся задачи регулирования реактивной мощ- ости, то более простой схемой АВК и близкой по своим свойствам к нереверсив-ому приводу постоянного тока является схема, показанная на рис. 3-11, б- Е этой cxeie ток ротора выпрямляется с пииошью трехфазного мостового выпрямителя \В) ы в цепь выпрямленного тока вводится добавочная ЭДС. В качестве источ вка встречно-включенной добавочной ЭДС используется зависимый инвертор (И). Дя согласования напряжения сети и инвертора используется трансформа-Р {Тр). Такая схема АВК обладает хорошей регулировочной способностью и Получила наибольшее распространение иа практике. уравнение динамики и структурная схема, характеризующие асинхронный двигатель при управлении добавочной ЭДС в цепи ротора, были получены в § 3- для изучения общего принципа управления двигателем без учета конкретной схемы реализации системы электропривода. Однако при рассмотрении электромагнитных процессов в силовой д) i о I часта системы электропривода в к, Ьж следует учитывать ряд особен- ностей в совместной работе асинхронного двигателя и тиристорного преобразователя. Как и при рассмотрении систем тирисюрных электроприводов постоянного тока, можно допустить непрерывную аппроксимацию напряжения зависимого инвертора. Параметры цепи асинхронный двигатель - выпрямитель - зависимый инвертор удобно привести к цепи выпрямленного тока. Эквивалентная схема электромагнитной цепи для этого случая показана на рис. 3-12, а. ЭДС ротора приводится к цепи постоянного тока через коэффициент схемы выпрямления; Приведенная индуктивность двнгателя при мостовой схеме выпрямителя равна где - приведенное к неподвижному ротору индуктив[[ое сопротивление фазы двигателя, дгд = (Z-io-Ь ы,д - номинальная угловая частота напряжения сети. Приведенное сопротивление двигателя /?д для трехфазного мостового выпрямителя в роторной цепи представляет собой сумму сопротивлений: где ЗдГд5/я - эквивалентное сопротивлеине, обусловленное явлением коммутация диодов выпрямителя; - сопротивление фазы ротора; R\s - соиротивленне статора, приведенное к цепи ротора, Сопротивление зависит от скольжения двигателя и, следовательно, является переменной величиной. Имеется некоторая зависимость /?д и от тока выпрямителя, однако при исследовании динамики этой зависимостью можно пренебречь. Сопротивление инвертора с учетом сглаживающего дросселя в цепи постоянного тока определяется по формуле 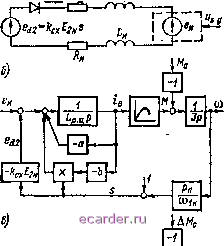
Рис. 3-12 где - индуктивное сопротивление фазы трансформатора; - активное сопротивление фазы трансформатора; ;?др - активное сопротивление дросселя. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 [34] 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |
||||||||||||||||