
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 [35] 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 Сопротивление является величиной постоянной. Суммарное эквивалент-вое сопротивление роторной цепи, приведеийое н цепи постояииого тока, равно р. ц ~ Н~ и И вследствие переменности /?д является величиной переменной. Суммарная эквивалентная индуктивность роторной цепн может быть принята постоянной величиной, рассчитываемой по формуле 2je, 2хг где W - индуктивность дросселя. При рассмотрении зависимости электромагнитного момента двигателя от тока в выпрямленной цепи различают несколько рабочих областей, связанных с коммутационными процессами в ТП [31]. Для первой рабочей области для второт рабочей области Структурная схема системы электропривода АВК с учетом нелинейных связей координат системы показана на рис. 3-12, б [39]. На схеме обозначено: а - = 2Ri -+ R, b = аягд/л + 2/?!. Ограничивая рассмотрение динамики областью токов выпрямителя от О до ig.H, можно приближенно считать где gj = ~-- - постоянная двигателя в схеме АВК. Кроме того, выполнив линеаризацию системы в рабочей точке, определяемой начальными значениями координат и параметров, получим линеаризованную структурную схему системы в приращениях координат, показанную на рис. 3-12, в. На схеме приняты обозначения: /?р.ц.няч - эквивалентное сопротивление в рабочей точке; Гр.ц.нпч эл ?р.ц.вач ~ электромагнитная постоянная времени роторной цепи в рабочей точке. 3-3. АВТОМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННЫХ КОРОТКОЗАМКНУТЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ 3-3-1. ЧАСТОТНОЕ УПРАВЛЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯМИ В СТАТИЧЕСКИХ РЕЖИМАХ На основании уравнений, описывающих переходные процессы в двигателе, может быть получена схема замещения одной фазы асинхронного короткозамкнутого двигателя с учетом регулирования в широком диапазоне частоты и напряжения статора (рис. 3-13). Индуктивные сопротивления д:,. хн соответствуют номинальной частоте статора и равны: = aLa: 4 = щМо; Хт = параметры роторной цепи приведены к статорной цепи. На основании схемы замещения могут быть установлены основные соотношения координат и параметров двигателя, с помощью которых можно выявить рациональные способы частотного управ- ленря 140). Такилн! соотношениями являются зависимости электродвижущей силы El, магнитного потока в воздушном зазоре Ф, тока статора /j, тока ротора /г, тока намагнич вания и электромагнитного момента М от параметров схемы замещения и регулируемых параметров v н у. Кроме основных соотношений, представленных в общеч виде, целесообразно использовать формулы, в которых в качестве неяависимых величин приняты поток двигателя Ф и ток статора /i. Основные соотношения в действующих значениях величин для трех указанных форм представления приведены в табл. 3-1. Приняты следующие обозначения = ] (3-57) b = /?j (1 + йог); = xK, = RilXm. e = 14- kai, где Ci - конструктивная постоянная двигателя; mi - число фаз статора; <р - Ф/Фд - относительный поток двигателя; ki, kg, fecT - коэффициенты рассеяния соответственно для статора {kai ~ = XilXm), ротора (*сг2 = , . , j? = X2lxJ\ И общий {ко = -i I , Записанные в общем виде основные координаты двигателя являются функциями параметров схемы замещения и р егулп ру ечых коор ди -нат V, V, и не создают однозначности в формировании алгоритмов управления. Однозначность в управлении основными координатами появляется при формировании в виде независимых координат потока двигателя или тока статора. Если обеспечить стабилизацию указанных координат, то все остальные координаты однозначно выражаются через абсолютное скольжение S- Исходя из этого различают два основных способа частотного управления. 1) частотное управление, при котором в качестве управляющих воздействий приняты частота н напряжение статора; 2) частотное управление, прн котором в качестве управляющих воздействий приняты частота и ток статора. Второй способ называют частотиО токовым управлением. Формирование механических характеристик асинхронных двигателей при частотном управлении, как н при управлении двигателями постоянного тока, подчинено задачам обеспечения требуемой перегрузочной способности и жесткости характеристик во всем диапазоне регулирования скорости, 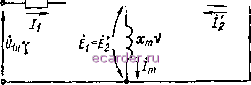 Таблица 3-1 Основные соотношения координат и параметров асинхронного короткозамкнутого электродвигателя при частотном управлении Искомая величина Значение величины в оищем виде Зьлюкие велвчисы Mai нитнон потоке Значение величины при неэй! ксимоч токе статора 8(82) А (v, bi) VA (v, 52) m&2) A (v, 5b) (OoH Л (v, Sa) он (-2) (is) Заданная перегр>зочная способность обеспечивается путем выполнения определенных соотношений между частотой и напряжением статора. Жесткость механических характеристик может быть сколь уюдно высокой при использовании обратных связей по скорости. Следует подчеркнуть, что и без обратных связей по скорости жесткость механических характеристик частотно-управляемых электроприводов переменного тока оказывается более высокой, чем у приводов постоянного тока. Это обстоятельство способствует применению простых систем управления асинхронными электроприводами, не оснащенными датчиками скорости и контурами регулирования скорости. Помимо требований формирования механических характеристик двигателей, к системам управления люгут предъявляться также требования оптимального упрарлеиия по энергетическим затратам, например обеспечение требуемых момента и скорости при минимуме тока статора или минимуме потерь, обеспечение макси- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 [35] 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |