
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 [37] 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 http://lakshmi-concern.ru Е-153 Древесный уголь e153 уголь. Б системах управления с ФП можно применять не только контуры регулирования напряження, но и подчиненные контуры регу-т1ирования тока. Функциональная схема такой системы управления показана на рис. 3-16. Синтез регуляторов напряжения {РИ) и тока (Р7 можно выполнять на основании исходной и преоазованнон структурных схем системы, показанных на рис. 3-17, а, 6. Инерционность сглаживающего фильтра на выходе выпрямителя в ТП частоты представляет собой основную инерционность, по сравнению с которой можно пренебречь инерционностью электромагнитной цепн двигателя. В связи с этим структурная схема асинхронного двигателя прн управлении частотой и напряжением статора, показанная в полном виде иа рис. 3-3, зда:ь представлена упрощенной. Параметры фильтра в структуре ТП частоты учтены полностью в соответствии со схемой, показанной на рис. 3-8. При преобразовании исходной структурной схемы рис. 3-17, а к виду рис. 3-17, б сделано предположение об отсутствии изменения скорости во время переходного процесса по напряжению ГЯ частоты. Это допущение дает возможность упростить исходную структуру. На схеме рис. 3-17, б приняты обозначении: 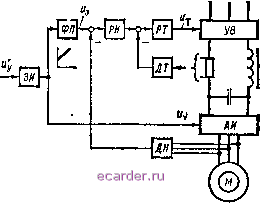 Рис. 3-16 п. ф. II Тф1 = где Гфд, Тф2 - постоянные времени сглаживающего фильтра. Оба регулятора системы приняты пропорционально-интегральными. Расчет параметров регуляторов выполняется в соответствии с общей методикой, изложенной в гл. 1. 3-3-3, СИСТЕМЫ ЧАСТОТНОГО УПРАВЛЕНИЯ С ОБРАТНЫМИ СВЯЗЯМИ ПО ЗДС СТАТОРА, СКОРОСТИ ДВИГАТЕЛЯ, СКОРОСТИ И ТОКУ ДВИГАТЕЛЯ При использовании обратной связи по ЭДС статора двигателя сравнительно просто реализуются системы, в которых может быть обеспечена стабильность потока двигателя при регулировании скоростн двигателя. Из табл, 3-1 следует A из Aifa 9-*- h -ft, TtpgpH AUia. Рис. 3-17 Отсюда (3-62) Следовательно, постоянство потока двигателя обеспечивается, если производить изменение ЗДС двигателя пропорционально изменению частоты статора. Задание по скоростн двигателя в этом случае является общим заданием иа частоту и ЭДС статора. Функциональная схема системы управления скоростью с обратной связью по ЭДС статора показана на рис, 3-18, а. Контур стабилизации ЭДС для заданной скорости включает в себя датчик ЭДС ДЭ и регулятор ЭДС РЭ. Измерение ЭДС статора можно производить с помощью дополнительных измерительных обмоток, выполняемых так же, 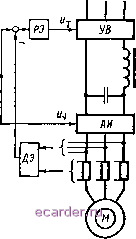 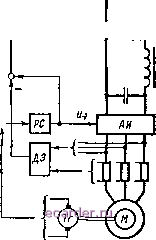 Рис. 3-1& как обмотки статора, либо с помощью измерительных устройств, восстанавливающ[[х значение ЭДС по напряжению и току статора, аналогично тому, как это делается при измерении ЭДС двигателя постоянного тока. Датчик ЭДС в рассматриваемом случае включает в себя трансформатор напряження, выпрямитель, усилитель с потенциальной развязкой в канале измерения тока, сумматор и фильтр. Синтез РЭ может быть выполнен по структуре системы с учетом тех же предположений, которые были приняты при рассмотрении структуры системы регулирования напряжения. Следует отметить, что передаточный коэффициент А. связывающий ЭДС и на-пряженнестатора, является переменным. Действительно, из табл. 3-1 имеем 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 [37] 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |