
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 [41] 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 а Q регулятора целесообразно выбрать и РПТ. Синтез PC в системе векторного управления выполняется аналогично тому, как это делается в системах управления электроприводом постоянного тока пои двухзонном регулировании скорости. Последовательно с PC устанавливается блок деления, компенсирующий влияние узла ппоизведения при формировании электромагнитного момента. Тем самым обеспечивается постоянство передаточного коэффициента оазомкнутой по скорости системы при изменении потокосцепления потора. Динамические характеристики системы векторного управ-денпя частотно-регулируемым электроприводом аналогичны динамическим характеристикам системы управления электроприводом постоянного тока. Недостатком системы векторного управления является сложность управляющих и функциональных устройств при реализации преобразования координат и фаз, выполнение компенсационных связей прн широком диапазоне регулирования скорости и нагрузки электропривода. 3-4. АВТОМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ С ФАЗНЫМ РОТОРОМ 3-4-1. СИСТЕМА УПРАВЛЕНИЯ С ВВЕДЕНИЕМ ДОБАВОЧНОЙ ЭДС В РОТОРНУЮ ЦЕПЬ Линеаризованная структурная схема асинхронно-вентильного каскада (см. рис. 3-12, в) полностью аналогична структурной схеме электропривода постоянного тока прн нерегулируемом потоке возбуждения. В связи с этим и система управления электроприводом может быть выполнена аналогично системе управления электроприводом постоянного тока. На рис. 3-24, а показана схема двухконтур-ной системы автоматического управления скоростью асинхронного электродвигателя, а на рнс. 3-24, б - структурная схема этой системы. Расчет РТ и PC выполняется так же, как для электропривода постоянного тока. Изменение параметров роторной цепи двигателя в зависимости от скатьжеиия может оказывать существенное влияние на динамику системы, если постоянная времени 7р.ц.нач близка к постоянной Pill = Т . Прн условии Гр.ц.на, > Г,/ изменение Rp, и Гр, .( на работе контура регулирования тока практически не сказывается. Действительно, передаточная функция разомкнутого контура регулирования тока выпрямителя равна Для пропорционально-интегрального регулятора тока Wp. (р)~ - Рр.т (tp.t Р + 1)/(Vt/) необходимо выбрать параметры нз условий п р. Ц. нач/р. II. мач , , Рр.т= 2TjkJt Vt р.ц.вач Для исходного режима имеем Прн изменении параметров электропривода R. и Тр. = = Lp ц/Яр а И неизменных параметрах РТ передаточная функция 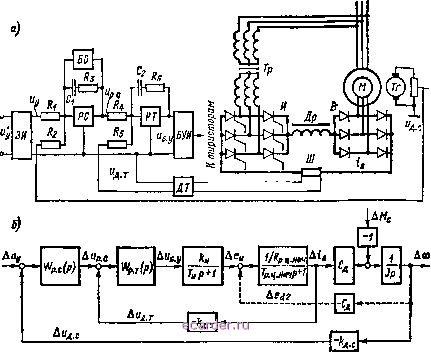 Рис. 3-24 Wj {р) будет изменяться. Это следует из выражения р.ц. Если Т р п.нвч n/t ТО в области существенных частот изменений координат контура регулирования тока можно приближенно записать Передаточную функцию замкнутого контура регулирования тока можно в этом случае считать постоянной: Если постоянная времени Тр.ц соизмерима с постоянной TJ и настройка контура выполняется аналогично изложенному выше, динамические характеристики контура будут существенно меняться. Чтобы избежать этого, можно использовать автоматическую поднастройку параметров РТ таким образом, чтобы стабилизн-повать динамические характеристики разомкнутой и, соответственно, замкнутой системы. Для этого необходимо изменять постоянную времени РТ в соответствии с равенством р.т = Тр ц нач (S)- Коэффициент .с будет оставаться постоянным, так как л р. Ц. иэч?р. ц. нач ц , Рр- от fe * - 2Т k k const. Для технической реализации такой настройки необходимо одновременно изменять сопротивления R, R и Rq регулятора тока (рис. 3-24, а) пропорционально скольжению двигателя. Выполняется это приемами, которые изложены в гл. 9. Как и в системах управления электроприводами постоянного тока, PC может быть пропорциональным (прн этом реализуется оптимизация по модулю контура скорости) либо пропорционально-интегральным (реализуется симметричная оптиьгазацня), что связано с конкретными режимами работы системы электропривода и требованиями к ошибке системы по нагрузке н допустимому перерегулированию по току. 3-4-2. СИСТЕМА УПРАВЛЕНИЯ С ВОЗДЕЙСТВИЕМ НА ДОБАВОЧНОЕ СОПРОТИВЛЕНИЕ В РОТОРНОЙ ЦЕПИ В асинхронно-вентильных каскадах энергия скольжения электродвигателя преобразуется по цепи выпрямитель - зависимый инвертор в энергию сети. Такой способ обеспечивает возможность управления электроприводом с достаточно высокими энергетическими показателями, что является весьма важным для электроприводов средней в большой мощности. Для электроприводов малой мощности получил распространение способ управления электродвигателем, при котором энергия скольжения не преобразуется в энергию сети, а расходуется на добавочном сопротивлении включенном на выходе выпрямителя роторной цепи. Регулирование скоростн в таком электроприводе производится плавным регулированием добавочного сопротивления с помощью широтно-импульсного Модулятора (ШИМ). Схема управления электроприводом показана на рис. 3-25. шИМ выполняется на силовом тиристоре Т. Для искусственной коммутации тиристора применяется блок коммутации БК, принцип действия которого рассмотрен в § 3-2. Неуправляемый выпрямитель В преобразует трехфазное переменное напряжение ротора в постоянное напряжение. Изменением добавочного сопротивления выходе выпрямителя изменяется ток выпрямителя и соотвегстеенпо ток ротора. Установившееся значение тока для конкретного значения добавочного сопротивления определяется нагрузкой на валу электродвигателя и ЭДС ротора. Значение добавочного сопротивления зависит от состояния силового тиристора 7\. Если 7*1 включен, то сопротивление Ядоб замкнуто накоротко, если включен, то в цепи выпрямителя будет полное сопротивление Ядоб- При работе Тх 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 [41] 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |