
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 [42] 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 в импульсном режиме среднее чначение добавочного сопротивления R дод ср может изменяться в пределах от О до /доб. По цепн выпрямителя бдет проходить непрерывный; п>льсир1ющнй ток, среднее значение которого может быть определено из уравнения бг т о вг где Г -период коммутации тиристора Ti; а= кг/Т - относительное время замыкания накоротко добавочяого сопротивления нли скважность импульсов модулятора, tag J -- время включенного состояния Т,; V - мгновенное значение выпрямленного тока ротора в интервале времени О-/вкт! -мгновенное значение выпрямленного тока ротора в интервале времени ?вкл Т, 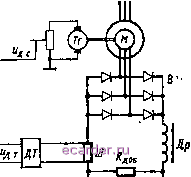 Ц>рпппги Рас 3-25 Для регулирования среднего значения добавоного сопротивления от О до Ядоб необходимо изменять скважность б от 1 до О Зависимость Ддоб.ср от 6 определяется формулой Ядоб.ср = Ядоб (I - б)- Частота коммутации модулятора устанавливается в зависимости от требуемого быстродействия модулятора по управляющему воздействию, потерь в тиристорах и значению электромагнитной иостоянной времени роторной цепн, при которой исключается режим прерывистых токов. Область регулирования скорости электропривода определяется рабочими участками граничных механических характеристик, соответств>ющих скважности 6 = О и б - 1 (рис. 3-26, а). Для исследования динамики рассматриваемой системы электропривода целесообразно, как и в системе электропривода по схеме -АВК, параметры электромагкитиой цепи двнгателя привести к цепи выпрямлеи-иого тока. Эквивалентная схема электромагнитной цепи для этого случая аналогична схеме рис. 3-12, а, но вместо добавочной ЭДС присутствует регулируемое сопротивление i?flo6(l-Управление электромагнитной цепью двигателя путем язмекечия схаджнрстн иядулятора. HMKHeflwajfcHewwaHyis лР*нс ваю1цая переходные пр< 1ессы в электроприводе, может (kttb пред- ёна в следующем виде. е =Р 1 4-1 1н Sil где ц = д доб (1 - + др] - суммарное эквивалентное сопротивление роторной цепи, приведенное к цепи постоянного тока; ц = (д+ др) суммарная эквивалентная индуктивность роторной цепи, приведенная к цепи иостоянного тока. 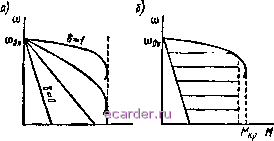 Рис 3-26 aug I- Aiis. \A.% Аеаг -ft, Рис 3-27 Напряжение блока управления модулятором (БУМ) связано со скважностью б эавнснмостью у= кб, где - передаточный коэффициент модулятора. Рассматривая переходные процессы в приращениях относительно начальных значений координат и параметров системы электропривода, можно получить линеаризадаиную систему уравнений, аналогично тему, как это было получено при рассмотрении системы АВК. Структурная схема системы электропривода °Удет в этом случае аналогична схеме рис. 3-24, 6, однако параметры схемы в Зна-j bHo большей степени будут подвержены изненениям вследствие иэменвй роторной цепи и напряжения БУМ. J. Как и в схеме АВК, система управления скоростью электропривода вюяжт вы/юлнена двухконтурной: с обратной связью по скорости двшателя и б А в. Gaaiapflfl fSQ с внутренней обратной связью по току выпрямителя. Структурная схема линеаризованной системы управления показана на рис. 3-27. Эквивалентное сопротивление роторной цепи и ток выпрямителя рассматриваются в виде некоторых начальных значении Яр ц.а. а и приращений Дйр ц, Ai относительно на-чальных значений (Яр ц = р.и.шч+ р.ц S= в.нач+ J Постоянная рремеии роторной цепи определяется из равенства Ур.ц.н,- р.ц/р ц.нап- Существенные изменения параметров электропривода приводят к изменению динамических характеристик контура токз. Такая параметрическая нестациопар-fccTb при широком регулировании скорости н нагрузки может быть ycTpaneiui ) рркенснием адаптивного регулятора тока, параметры которого будут меняться Е ссответствии с изменением параметров ротсркси непи двигателя. Принципиальная схема системы управления злектропрИЕОдом без контуров самонастройки выполняется аналогично системе управления АВК- В частном случае РТ и PC могут быть выполнены пропорционально-интегральными. Меха-1;н:еские характеристики замкнутой системы в рабочей области регулирования cFopccTH электродвигателя гоказаны на рис. 3-26, 6. Ограничение моменталвн-гатсля может быть выполнено ограничением тока выпрямителя путем применения блока ограничений (БО) в PC. 3-4-3. СИСТЕМА УПРАВЛЕНИЯ С ВОЗДЕЙСТВИЕМ НА НАПРЯЖЕНИЕ СТАТОРА Регулирование скорости асинхронных электродвигателей в широком диапазоне возможно путем регулирования напряжения статора, если механические характеристики электродвигателя искусственно смягчены. Наиболее просто эго можно выполнить, если в цепь ротора двигателя включить постоянное добавочное сопротивление. Наиболее благоприятным режимом работы: таких электро-грнводов является режим с вентиляторным моментом нагрузки. Схемы мектро-приводов получаются сравнительно простыми и применяются в установках малой кощности, работающих в кратковременных и повторно-кратковременных режимах работы. 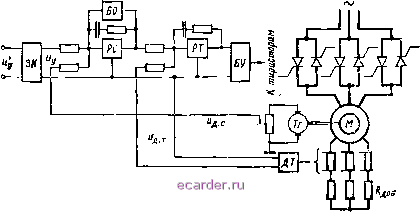 Рис. 3-28 Динамические процессы в системе электропривода могут быть исследованы на основании выводов, сделанных при рассмотрении динамических процессов г. acHiixpoHHOH электроприводе при регулировании частоты н напряжения статора. Следует рассматривать частный случай управления, соответствующий постоянству частоты статора. Принципиальная схема системы управления нереверсивным асинхронным электроприводом с воздействием иа напряжение статора показана на рис. 3-28. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 [42] 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |