
|
| |
|
Слаботочка Книги -упкрование напряжения производится путем сдвига по фазе управляющих vibcoa в тиристорах, включенных по противонараллельной схеме в каждую -/(.-гатора двигателя. Как и в предыдущих схемах, система выполняется двух--oHTVp ** ротора измеряется с помощью шунтов. 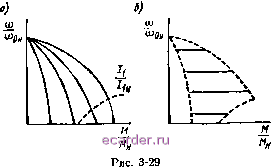 Механические характеристики в разомкнуто!! системе электропривода показаны на рис. 3-29, а. Область регулирования скорости ограничена максимальным л минимальным напряжениями статора двигателя и допустимым током статора /[. Для статического режима работы аси[1хронного электродвигателя можно записать нр. н * aoi кр. н кр. 11 где Msp. н - критический момент при номинальном напряжении статора; /акр. н ~ ток ротора, соответствующий маменту Мнр.и- Механические характеристика в замкнутой системе электропривода при регулировании скоростн в рабочей области показаны па рис. 3-29, б. ГЛАВА ЧЕТВЕРТАЯ УПРАВЛЕНИЕ СКОРОСТЬЮ ЭЛЕКТРОПРИВОДОВ ПРИ УПРУГОЙ связи ДВИГАТЕЛЯ С МЕХАНИЗМОМ 4-1. ОБОБЩЕННАЯ СТРУКТУРА СИЛОВОЙ ЧАСТИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ 4-1-1. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ УПРУГОВЯЗКОГО ОБЪЕКТА При рассмотрении изложенных выше принципов построения систем управления электроприводами предполагалось, что кинематическая связь между двигателем и исполнительным органом yjO) ие подвержена упругим деформациям и не содержит зазора. Ирн таком допущении скорость двигателя и приведенная к двигателю скорость ИО равны между собой не только в установившемся Риме, но и в переходных процессах. Влияние механизма иа ра-электропривода проявляется лишь в том, что механизм определяет .характер момента нагрузки на двигателе, а момент инерции привода является суммой моментов инерции двигателя, редуктора и приведенного к двигателю момента ниерцин ИО. Изменение момента нагрузки на механизме в этом случае эквивалентно изменению момента нагрузки на двигателе. В большом числе случаев идеализация, основанная на представлении о жесткой связи двигателя и ИО, оказывается допустимой. Это связано с тем, что частота собственных упругих колебаний механизма оказывается значительно выше частоты, определяющей быстродействие АСУ ЭП. Если это условие не выполняется, пренебрежение упругостью прн анализе и синтезе системы может привести к ошибочным результатам. Чем выше быстродействие системы управления, тем больше вероятность того, что влияние упругости на работу АСУ ЭП будет заметным. 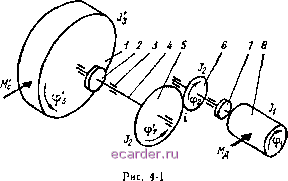 Рассмотрению вопросов динамики АСУ ЭП реального механизма должно предшествовать создание модели механизма. Эта модель, с одной стороны, должна быть достаточно подробной, для того чтобы составленное на ее основе математическое опн-саине давало достоверную картину динамических процессов. С другой стороны, она должна быть по возможности простой, чтобы изучение этих процессов на ее основе было реально осуществимым. Критерием допустимости принятого упрощения должно быть удовлетворительное совпадение теоретических результатов с результатами эксперимента. На рис. 4-1 приведена схема электромеханической системы, где исполнительный орган / через редуктор, условно показанный в виде зубчатых колес 5 и б, приводится во вращение двигателем, ротор которого изображен в виде вращающейся массы 8. Соедние-иие редуктора с двигателем и ИО осуществляется с помощью муф 2 и 7. Валы вращаются в подшининках 3. Связь двигателя с ИО в общем случае оказывается упругой за счет скручивания вала и упругой деформации зубьев колес редуктора, а также соединительных муфт, выполненных, например, с обрезиненнымн. пальцами. Kинeитичecкaя цепь в общем случае содержит обусловлен- ьгй неточностью изготовления узлов передачи зазор, который паспредел между муфтами и зубчатым зацеплением в редукторе. На систему действуют внешние моменты: момент двигателя М , понложенный к ротору, и действующий на ИО момент нагрузки Мс, котхэрый может быть активным или пассивным. На работу механизма оказывают влияние диссипативные силы, представляющие собой силы треиия в подшипниках, силы трения в зубчатых зацеплениях, а также силы внутреннего трения в материале вала, возникающие в процессе его скручивания. При исследовании динамических процессов в приводах механизмов обычно оказывается допустимым представление двигателя и механизма в виде системы с сосредоточенными параметрами, когда ротор двигателя н отдельные элементы механизма, такие, как ИО, зубчатые колеса, маховики, узлы, совершающие поступательное движение, и т. п., представляются в виде материальных точек, обладающих определенными массаяш нли моментами инерции, а идеализированные безынерционные связи между ними массой не обладают н характеризуются только упругостью и диссн-патнвными свойствами. Считается, что внешние силы нли моментьг приложены к сосредоточенным массам. Весьма сложную задачу представляет собой создание математического описания днссипатнв-ных явлений. Теоретическое решение ее часто дает весьма приближенные результаты, что определяет значительные трудности прн создании достоверной модели упругой систшы с учетом сил трения. В рассмотренном на рис. 4-1 примере сосредоточенными массами можно считать массы ротора 8, зубчатых колес 5 и я исполнительного органа 1. Упругости зубчатого зацепления н муфты 7 могут быть объединены в общую упругость связи двигателя с редуктором, а упругость связи редуктора с ИО определится как результирующая упругость вала 4 и муфты 2. Имея в виду, что зазоры в механической передаче будут вве-д.ены при построении структурной схемы и пока ие учитываются, можно написать уравнения равновесия моментов, действующих на выделенные сосредоточенные массы: - Afi2 - bi2 {Ц>1 - Фв) - Mfi = Jinl 13 - fci2 (Фа - Ф1) - 4 ~ Ф)1 - = Увфв; = (фа - (pS); А1 - Ь (ф - ф) - iWc - AfЬ = ЛФ . (44) Де - момент двигателя; Мс - момент нвгрузки нв исполнн- ьном органе (штрихом помечены величины, ие приведенные к валу двигателя); i - передаточное число редуктора; <pi, ipj, ра, 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 [43] 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |