
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 [47] 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 при замкнутой иа источник питания якорной цепи колебания скорости двигателя и его ЭДС, возникающие в результате внешнего воздействия на привод, вызывают колебания тока якоря и момента , Это оказывает демпфирующее воздействие на процесс колебание в электромеханической системе двигатель-механизм 153]. Если система управления электроприводом разомкнута и ЭДС преобразователя, так же, как момент нагрузки представляет собой внешнее воздействие, то при принятых допущениях характер изменения координат системы определяется передаточными функциями (4-10) н зависит от соотношения параметров системы и вида воздействия. Параметры, характеризующие механическое демпфирование, 3 и обычно в малой степени влияют на переходные процессы, так как основное демпфирование осуществляется за счет электропривода. В замкнутой системе управления настройка системы должна быть произведена так, чтобы обеспечивалось наиболее эффективное демпфирование колебаний электроприводом и движение ЯО было плавным, несмотря иа наличие упругой связи. 4-2. УПРАВЛЕНИЕ СКОРОСТЬЮ ЭЛЕКТРОПРИВОДА ДВУХМАССОВОГО УПРУГОВЯЗКОГО МЕХАНИЗМА В СИСТЕМЕ С ПОДЧИНЕННЫМ ТОКОВЫМ КОНТУРОМ 4-2-1. ВЛИЯНИЕ УПРУГОСТИ НА РАБОТУ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ с ПОДЧИНЕННЫМ токовым КОНТУРОМ в гл. 2 была рассмотрена система регулирования скорости электропривода с подчиненным токовым контуром в предположении, что двигатель жестко связан с ИО. В реальной системе существуют упругие деформации кинематической цепн н целесообразно определить, в каких случаях, несмотря на это, контуры тока и скоростн можно настраивать так же, как в жесткой системе. Структурная схема системы при наличии упругой связи двигателя с ИО в предположении, что трение в основном происходит внутри связи, показана на рис. 4-4, а. На осиоваини матричной передаточной функции (4-10) могут быть записаны передаточные функция, связывающие при управляющем воздействии скорость двигателя с током якоря (моментом двигателя) и скорость ИО со скоростью двигателя : Ao3i (р) А Ml (р) AcDg (р) Дй)з (р) 1 yTl,p-ykcT,p-\-\ АЩ (Р) уТур+каТеР~\-1 Д ! (р) Дт. (Р)/ lC.n ip) Тогда объект системы подчиненного регулирования можно представить в виде рнс. 4-4, б, где введены обозначения i iP) = Пр -f k,TcP + 1 = Пр -f 2Ту1,р + 1; \ Лр) = УПр+ксТсР]-1=уПр-\-2Уу ni+i. Р AXtu RC 1 L Гг.пР*1 Га.тР 5) ГоГ, 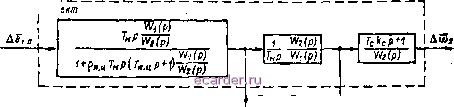 Ркс 4-4 Токовый контур. Считая в соответствии с постановкой задачи, что регулятор тока настроен так же, как в жесткой системе, можно на основании структурной схемы рис. 4-4 записать передаточную функцию разомкнутого токового контура в виде (2-34). В отличие от жесткой системы сомножитель А (р), характери-зукнцин влияние обратной связи по ЭДС двигателя, будет иметь вид А{Р) Р,.цГ р (П.цр+ 1) Wi (p)fW (р) 1 +Рял.Т Р (Гя.цР + I) Wi {p){W (р) Влиянием упругости на токовый контур можно пренебречь в следующих случаях. А. Приведенный к двигателю момент инерции много меньше момента инерции самого двигателя, т, е. коэффициент соотношения масс v I. В этом случае Wi ip) (Р)> сомножитель Л (р) и передаточная функция токового контура имеют тот же вид, что и в жесткой системе. Lm\B{jw)\ 1 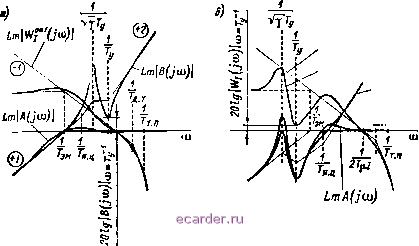 Рис. 4-5 Б. Параметры системы едвигатель - механизм таковы, что наличие упру-тоя связи не вызывает колебаний тока якоря в разомкнутой системе. Этот сл>чай характеричуется тем, что вид частотной характернстикн А (/а) соответствующе сомножителю А {р), близок к таковому в жестксй системе. Бид ЛАЧХ для некоторого конкретного соотношения параметров приведен на рис, 4-5, а. Через ° ip) обозначена передаточная функция В (p)=9 .vTmP (Гя.цР-Н 1) (P)/Wi (р). и характеристика сомножителя А (р) построена в соотаетствин с выражением (р)= В ш\-\-В (р)]. пели участок ЛАЧХ Lm В (/ш) [ в зоне частоты со = 1/Ту располагается ше оси абсцисс, что можно охарактфнзовать выполнением условия Igj Д(/б)) , >6дБ, то характеристика разомкнутого токового конту- Pt построенная в соответствии с (2*34), ®УДет, как и в жесткой системе, отличаться от Lm частот левее (1/Г, = Щря.цТ в основном- в зоне 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 [47] 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |