
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 [48] 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 Условие прелебреженнн влиянием ЭДС двнгателя яа работу токового контура, определенное как Т > 20 Т, остается справедливым и для рассматриваемого случая, В. Колебания тока якоря, вызванные колебаниями ЭДС при катебаниях механической части привода, в разомкнутой систше c\TD.ecTB>TOT, но при замыкании токового контура его быстродействие достаточно велико для того, чтобы при возмущении в виде изменения ЭДС двигателя значение тока якоря определялось только входным сигналом контура, т. е. напряжет1ием регулятора скорости. Соответствующие ЛАЧХ показаны на рнс. 4-5, б. Хотя характеристика разомкнутого токового контура Lmr,(/(D) сильно деформирована, характеристика замкнутого контура тока, подстроенная па основании передаточной функции 7 (Р) будет мало отличаться от характеристики в жесткой системе, ее.1н провал ЛЛЧХ Lm ] Wj (/со)! при частоте со = ЬТу располагается выше оси ы и соблюдается условие 20 Ig j (/ю) t.-i > 6 дБ, Чем ниже будет проходить ЛАЧХ разомкн>того токового контура при л- стоте (О = у . тем больше будет отличаться ЛАЧХ замкнутого токового контура в упругой системе от соответствующей характеристики в системе жесткой. Это отличие будет проявляться в наличии провала ЛАЧХ при частоте Контур скорости. Рассматривая контур скорости, будем полагать, что влиянием обратной снязи по ЭДС двигателя можно пренебречь. Тогда отличие передаточной функции разомкнутого контура скорости в упругой системе от соотв-г-ствующей передаточной функции в жесткой системе сведется к наличию в первой из них сомножителя (p)/Vt\ (р). Считая, что PC выбран как в жесткой системе, настроенной на ОМ, можно записать 16 (Р)= К ip) {pWi (РЬ (4-12) где W° (р) передаточная функция контура в жесткой системе при настройке на оптимум по модулю. Здесь тоже могут быть рассмотрены три случая, когда влиянием упругости иа контур можно пренебречь. A. Коэффициент соотношения масс 7 I. Очевидно, что при этом (р) = = (р). Это означает, что влияние на электропривод со стороны механизма ничтожно мало н контур скорости может быть настроен, как в жесткой системе. Однако это означает также, что колебания ИО не передаются на электропривоя с АСУ и он не оказывает заметного демпфирующего воздействия на колебания механизма, которые затухают лишь за счет действия дисснпативных сил. Б. Частота упругих качебзний значительно выше частоты среза ЛАЧХ контура скорости. На рис. 4-6, а показан вид характеристик, отвечающих передаточной функции (4-12). Контур практически можно настраивать так же, как в жесткоГг системе, если 20 Ig (/w) 6 дБ. а = Ту B, Частота 1/Ту значительно ниже частоты 1/(2Т), являющейся частотой среза в жесткой системе при стандартной настройке (рис. 4-6, б).Поскольку сомножитель (p)/Vli (р) в области высоких частот равен у, характеристика Lm [ Wfifcj) [ идет в этой области на 20 ]g у выше, чем Lm \V° (/м) ! и необходимо снизить коэффициент усиления PC в у раз по сравнению с аналогичным коэффициентом при стандартной настройке, чтобы сохранить в зоне частоты среза вид ЛАЧХ контура скорости с упругостью таким же, как в жестко!! системе. При выполнении этого условия для пренебрежения влиянием упругости на контур скорости надо, чтобы характеристика разомкнутого контура Lm j №щ(/ю)/у1 при частоте 1/(У у?у) проходила хотя бы на 6 дБ выше оси абсцисс: 20 [g Возможность настроить контур так же, как в жесткой системе, не 031гачает однако, возможности пренебрежения влиянием упругости па работу системы, потому что необходнью еще оценить характер изменения скорости ИО ia. В случае Б резонансный всплеск характеристики, соответствующей передаточной функции Да>2 (о{р), будет почти полностью компенсирован за счет провала ЛАЧХ Lm I w Ow) I ри частоте 1/(У\Ту){рас. 4-6, й). В характеристике,связывающей скорость ИО с задающей величиной на входе контура скорости, будет существовать резонансный всплеск при частоте 1/Ту. Однако, поскольку он будет располагаться значительно ниже оси абсцисс, амплитуда упругих колебаний ИО будет невелика, В случае В, когда скорость двигателя будет меняться так же, 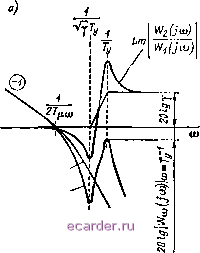 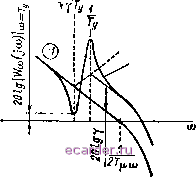 Рис. 4-6 как в жесткой системе при стандартной г1астройке, электропривод практически не будет демпфировать колебания ИО иа резонансной частоте 1/(7 у) и они будут затухать только за счет дисснпатизпых сил. В этом случае, так же, как в случае, когда параметры системы таковы, что влиянием упругости пренебречь нельзя, встает задача выбора настроек регуляторов, а если это необходимо, то и введения дополнительных корректирующих устройств, которые позволили бы обеспечить плавное движение механизма при максимально достижимом быстродействии. 4-2-2. НАСТРОЙКА КОНТУРА СКОРОСТИ СИСТЕМЫ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ С УПРУГОСТЬЮ В общем случае, когда сформулированные вып1е условия пренебрежения упругостью не выполняются, осуществить настройку Регуляторов в соответствии с принципами, изложенными в гл. 2, ьевозможио. Если в жесткой системе предельное быстродействие определялось суммой малых постоянных времени, то в системе с упругостью оно зависит от постоянной времени упругих колебаний. Часто суммарная малая постоянная времени контура скорости Гц- Ту, и при правильно выбранных настройках регуляторов отдельные малые постоянные времени не оказывают заметного влияния иа переходные процессы. Исходя из этого, рассмотрим случай, когда быстродействие токового контура велико iiip) П и постоянная времени фильтра тахогенератора мала посравненнюс Ту (Тр 0), а затем определим предельно допустимое значение при котором могут быть реализованы настройки, полученные для системы без малых постоянных времени. Интересуясь в первую очередь возможностью демпфирования упругих колебаний за счет автоматизированного электропривода, пренебрежем влиянием дисснпативных сил. AM,; i 1 -ТсР Aiog ----W,.c2{p) .4 1 Рис. 4-7 Структурная схема, построенная на основании рис. 4-4 с учетом этих допущении, приведена нарис. 4-7. Если применяется пропорциональный PC с Wp j (р) = ftp то передаточные функции, характеризующие изменение скорости двигателя и исполнительного вала, при управляющем воздействии (без учета показанных штриховыми линиями связей) будут: Affy (р) TTl, , . , , р.с р.С АМа (р) I - - - Affy (р) ТТ (4-13) яр,с р. с уравнение третьей степени, полученное в результате приравнивания к нулю полинома-знаменателя, может быть нормировано, поВышнеГрадскому 17], путем замены р = sQ, где средиегеометри- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 [48] 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |