
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 [51] 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 сравнивая последнее выражение с (4-16), можно сделать вывод, что введение обратной связи по производной от скорости И О приводит к эффекту, эквивалентному увеличению коэффициента соотношения масс. Следовательно, в системе без малых постоянных времени при небольших значениях у можно, вводя обратную связь по производной от скоростн ИО, получить плавные переходные процессы, и в частности переходный процесс по управлению, соответствующий значению - Т2/2, хотя в нескорректированной системе движение вала ИО имеет сильно колебательный характер. Для обеспечения такого процесса надо так выбрать коэффициент усиления пропорционального PC н постоянную времени обратной связи по производной от скорости, чтобы рабочей точкой являлась точка 6 на диаграмме рнс. 4-8 н выполнялось равенство АВ - уо при Л = 5 = V v . где 7о - 5,8. Подставляя это равенство в вы-ражеш1е для А и В, можно определить fep с н глубину обратной свйзн To.ci. необходимые для осуществления такой настройки: К-кфЯ = Т *П-. (4-24) Изменение скоростн Шз при скачке управляющего воздействия соответствует переходной характеристике для у = 5,8 на рис. 4-9. Реальная длительность переходного процесса определится значением среднегеометрического корпя Оценка возможности введения такой обратной связи в реальной системе, обладающей малыми постоянными времени, может быть произведена в результате рассмотрения передаточной функции разомкнутой системы. Допуская, что на измерителях скоростей и 2 предусмотрены одинаковые фильтры с постоянной времени Гд с н что постоянная времени фильтра па выходе дифференциатора в 10 раз меньше постоянной времени дифференцирования, т. е. что М0Ж1Ю получить передаточную функцию разомкнутой скорректированной системы T p{n-P-)V 0.1?o,aP--i;(7j,P-bl)(7-.,pH-l)- Подставляя сюда выражения для ftpи То.а при уо = 5,8, можно убедиться, что прн отсутствии малых постоянных времени токового контура н фильтров измерителей скорости частота среза ЛАЧХ лежала бы примерно в пределах от 1/(0,3 Ту) (при у = 1) до 1/(0,4 Ту) (при 7 -= 3). Наименьший запас по фазе прн v = 1 соста- вляет около 65 . Поэтому можно считать, что достаточный запас по фазе в реальной системе будет обеспечен при выполнении условия Гд >=Лх+Г/, (0,2 4-0,3) Ту, причем большая цифра относится к случаю -у = 3. Реакция иа скачок возмущающего воздействия будет зависеть от параметров системы. Примерную оценку ее можно произвести, нормируя передаточную функцию aqjam (4-23) путем умножения ее на tlT подставляя в нее значения ftp. и T.d на основе выражений (4-24): 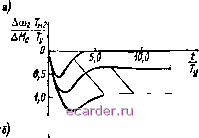 на \ \\ f=i,QS 2,0 3,0 АНс Ту р1 +ур% +УЧУЧ+1 где = Тур. Соответствующие згой передаточной функции переходные характеристики при значениях 7, равных 1,05; 2,0 н 3,0, приведены на рнс. 4-11, а. Положительный эффект может быть получен н при введе-инн на вход PC сигнала по второй производной от скорости ИО. Однако двукратное дифференцирование обычно трудно выполнить из-за наличия пульсаций на выходе измерителя скорости. В отношении качества переходного процесса по управлению тот же результат может йлть получен, если на вход PC ввести сигнал, пропорциональный разности скорости двигателя и приведенной к двигателю скорости ИО, т. е. положить в схеме рис. 4-7 o.z2{P) = - o.ziiP) =о.с- Передаточная функция по управлению имеет в этом случае вид Ащ (р) 1 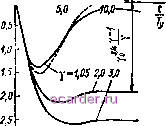 Рис. 4-11 f-P+vr (1 + Кл)Р+г Р+1 Коэффициент передачи PC н коэффициент обратной связи надо выбрать в соответствии с выражениимн (4-26) Ktj{tyfj*) Jfe,.e = (v*-Y)/Y. Средаегеометрический корень равен Йо= \/{Туу1% (4-27) благодаря чему прн том же характере переходной функции при управлении длительность процесса будет в Уу/У раз больше, чем при введении обратной связи по производной от щ. Передаточная функция по возмущению получается в виде (Р) t . ПГ 1Р + рс( + о.с)ПР+1 в нормированной форме эта передаточная функция имеет вид Соответствующие переходные процессы показаны сплошными линиями на рнс. 4-U, б. HecfcioTpH иа то, что применение обратной связи по разности скоростей дает худший эффект, чем введение в систему сигнала по производной от с1>2, оно может оказаться полезным, когда введение сигнала по производной невозможно из-за влияния малых постоянных времени. Без значительного увеличения колебательности двигателя и ИО связь с параметрами, рассчитанными исходя из ув - 5,8, может быть введена в реальной системе при Т < (0,7 -0,8) Ту. Достоинством такого способа коррекции является отсутствие необходимости дифференцировать сигнал скоростн ИО. 4-2-4. НАБЛЮДАТЕЛЬ В СИСТЕМЕ УПРАВЛЕНИЯ СКОРОСТЬЮ С ПОДЧИНЕННЫМ ТОКОВЫМ КОНТУРОМ Ш сказанного выше очевидно, что при малых значешях коэффициент.! соотношения Aiacc для обеспечения плавного движения ИО целесообразно введение в систему информации о его скорости или ускорении. Если непосредственное измерение скоростн ИО невозможно, то в стационарной системе результат >10жет быть достигнут путем применения наблюдающего устройства, которое должно по измеренным току якоря н скоростн двигателя восстановить пронз-Еодню ОТ скорости ИО или разность скоростей Wj - cOg (рис. 4-12, а). При оценке работы системы необходимо иметь в виду, что на нее действует йозмущеиие в виде момента нагрузки, который в подавляющем бодьшннстее случаев не может быть измерен н введен на наблюдатель. С>ществ>ют [25] спо-*ы построения наблюдателей, которые принципиально позволяют произвести точную оценку вектора состояния и при действии на объект неизыеряемого воз-м>щения, Для этого необходимо, чтобы возмущающее воздействие могло быть идентифицировано н описано системой дифференциальных уравнении. Эти уравнения включаются в общую систему уравнений, н для пол>ченного расщирен-Ного объекта по общим правилам строится наблюдатель полного порядку, крто-Рыи восстанавливает как вектор координат системы, так и вектор возмещения. УДНако в большинстве случаев возмущение носит произвольный характер и его тематическое описаний неизвестно. Тогда может быть поставлена задача точ- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 [51] 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |