
|
| |
|
Слаботочка Книги 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 [52] 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 iioro восстанов.пения координат лишь в установившемся режиме, когда уТТ = const, т. е. ДМс 0. В переходных же процессах, связанных с изменеинеч нагрузки, наблюдатель будет восстанавливать координаты системы и момещ 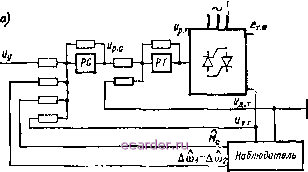 lif,c Щ, Zllp 11 Тм1 г- i TmiP л л л л л , л Рнс 4 Г2 1гагрузкн с ошибкой. Но п в этом случае введение на вход системы восстановленного возмущения может благотворно сказаться иа вкде переходных процессов. Для обведенного на рис. 4-12,6 штриховой линией расширенного объекта, в коюргаи момент нагрузки рассматрниается как одиа из координат = Д/Йс. ток якоря - как снгвал управления, можно записать Матричная структурная схема наблюдателя полного порядка приведена на рис. 1-16, л. Поскольку единственной измеряемой координатой объекта является Xi = Щ, матрица выход,1Юго сигнала есть С=11 О О 0]. Наблюдатель должен включать в себя четьфе интегратора, на вход первого из которых вводится сигнал управления Д1я н сигнал ошибки, умноженный на коэффнциет ц, а на входы остальных-только сигналы ошибки, взятые в мясштзбах, олределясуыл коэффициентами ку k. Эги коэффицие1(ты представляют coSovi ачемсты матрицы наблюдателя K[Jii hi hi hiY В индексах коэффициентов первая цифра означает номер интегратора, иа входе которого действует сигнал, а вторая - номер переменной, по которое вводится связь, Для наглядности основная часть структ>ры наблюдателя показана на рис. 4-12, 6 в виде модели, повторяющей структуру объекта [591. В результате три интегратора наблюдателя имеют постоянные времени, 01личныс от единицы. В связи с этим наих входы вводятся связи с коэффициентами кцТщ, кцТс, hiTuz П 21 и соответственно. Как видно из п, l-4-t, значения элементов матрицы К, определяющих динамику наблюдателя, находятся из выражения для определителя матрицы pl-(AKC) = P + hi О Ъ J- ймеющего вид Ткг О Т\2 Р - 1 ( hi det [pi - (А кС)1=р-f й.рз / ] ,2 .L Tsi I TcTyiiT2 Выбирая для распределения корней наблюдателя стандартную форму Баттерворта 4-го порядка 0*23) и приравнивая коэффициенты при одинаковых степенях р, можно получить значения коэффициентов связей наблюдателя; Aii = 2,6<Bo,i; *31 = 2,6Мо hi = он I Th1> (4-29) - При введении в систему обратной связи по пронзввдной от (3 сигнал-ов-ратной связи должен быть взят со входа интегратора 1/ (Т) наблюдателя. Сигнал по разностн скоростей, как это показано для рассматриваемого слу, чая на рис. 4-12, б, снимается с точки после сумматора со входа звена Одним из недостатков снсткяы с коррекцией по разностн скоростей является наличие при у > 1 статической ошибки при действии иа систему нагррки (см. рис. 4-11. б). То обстоятельство, что сигнал в статике равен моченту нагрузка AXIc, пдаволяет использовать его для кдатенсацни эюй ошибки. В установившемся режиме АМ = \Му = Д/дДйр. Поэтому для кдашеасации установившегося значения момента нагрузки сигнал должен быть введен на вход системы через звено с передаточным коэффициентом l/Rp. с. При отработке управляющего воздействия, когда наблюдатель восстанавливает координаты системы без ошибки, соблюдается равенство Xi = х. Сигнал на входе интегратора, моделирующего нагрузку, в течение всего переходного процесса равен нулю, и процесс в системе с наблюдателем протекает так же, как в системе с обратной связью, - по разности скоростей - Ц. Прн изменении момента нагрузки равенство х - х нарушается и сигнал Хх поступает на вход системы. Вид переходного процесса будет зависеть от параметров системы и быстродействия наблюдателя. Этот переходный процесс может быть оценен в результате рассмотрения матричного уравнения системы, включающей в себя объект, токовый контур, наблюдатель и обратные связи. На основании структурной схемы рис. 4-12, б прн упрощающем предпачо-жении, что быстродействие токового контура весьма велико, т. е. (л) I. а Ьйу = О, это уравнение записывается в виде Ч л;.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 [52] 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |